Sensor Signals and Information Processing Area
Development of wearable sensor systems to monitor human movement
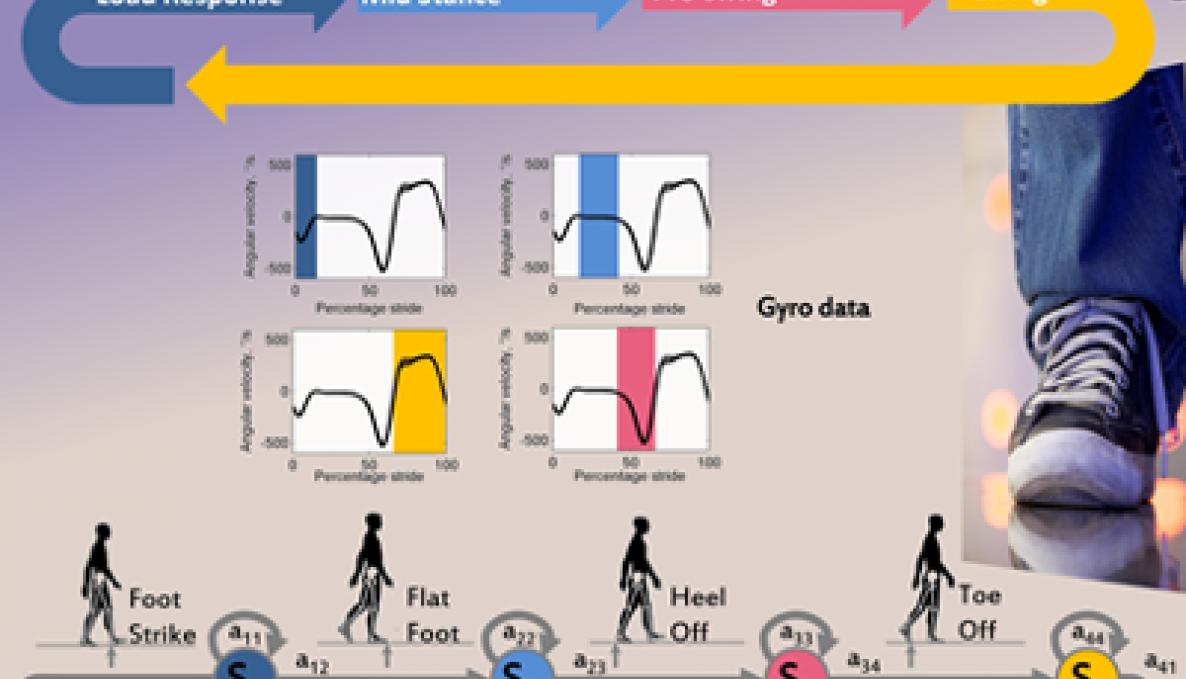
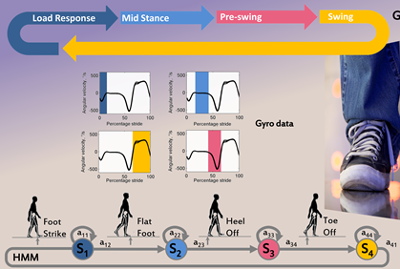
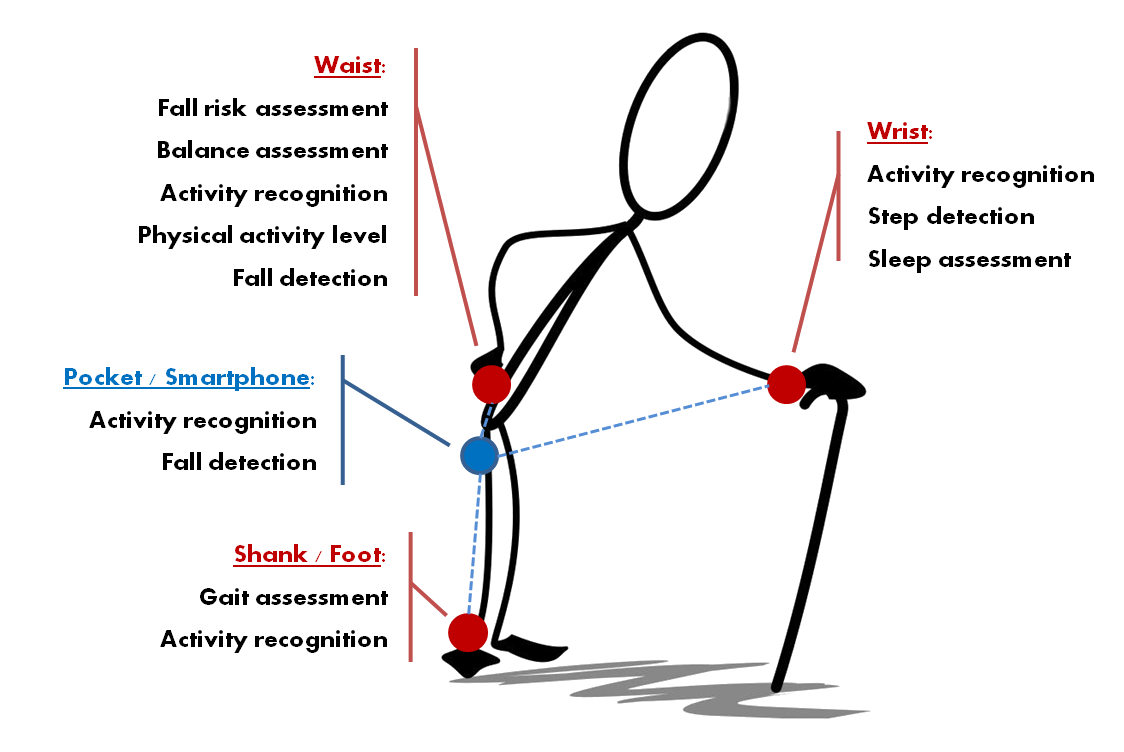
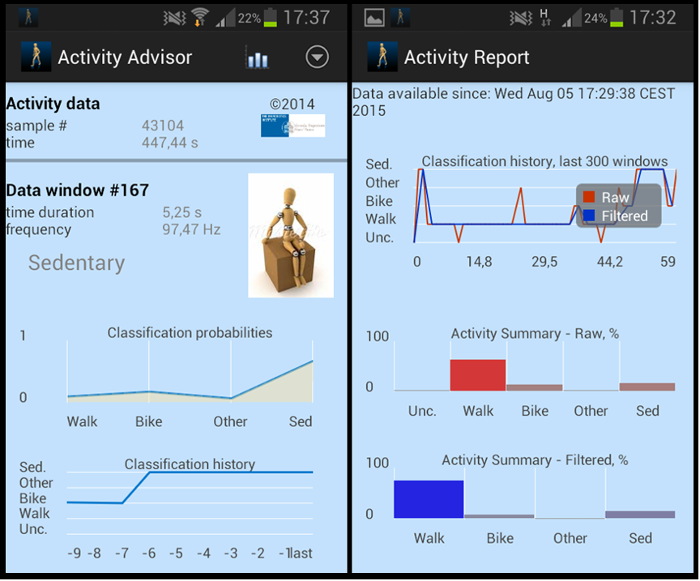
The research activity concerns the design, development and validation of wearable inertial sensor systems for ambulatory human motion monitoring. The wearable inertial sensor systems are composed of a number of wireless Inertial Measurement Units (IMUs) attached to selected points on the human body (wrist, waist, trunk, hip, shank, foot), while the subjects accomplish a number of activities of daily living (walking, jogging, running, climbing stairs, and so forth). The sensor data can be logged and uploaded to a host computer, where they are processed and analyzed for different purposes (activity classification, fall detection, gait phase detection, estimation of spatial-temporal parameters of gait and body segment pose). The computational methods that are currently investigated are machine learning methods (Support Vector Machines, Gaussian Mixture Models, Hidden Markov Models) and stochastic filtering/estimation methods (adaptive extended Kalman filters). A specific research theme concerns the fusion of inertial and visual measurements, and the development of sensor fusion strategies for ego-motion estimation from hand-held monocular camera/IMU. For each specific application under investigation, efforts are currently undergoing to understand the better way to distribute the computational load between the sensing nodes and the host computer, in anticipation of real-time applications of the devised computational methods.
The main research streams of the group are:
- Pedestrian navigation systems, inertial measurement units, barometric pressure sensors and magnetometers data fusion;
- Fall detection systems for high fall risk people monitoring;
- Rehabilitation and Assistive robotics: development of a robotic walking aid for kids with cognitive disorders;
- Machine learning algorithms applied to human movement analysis: human activity classification, physical activity level assessment, gait parameters estimation, pre/post impact fall detection algorithms;
- Inertial systems for balance and gait symmetry evaluation;
- Computer vision applied to movement analysis and visuo-inertial data fusion;
- Balance/Gait assessment through low cost force platform (using hacked Nintendo Balance Boards and Wiimotes);
- Development of simplified rehabilitation games;
- Project and development of custom sensing nodes & Android smartphones interfaces.
Principal Investigator
Prof. Angelo Maria Sabatini
e-mail: angelo.sabatini@santannapisa.it
Phone: 050-883415