Relief
A series of implantable devices that can be an effective solution to the problem of urinary incontinence
The objective of the RELIEF project is to create a series of implantable devices that can be an effective solution to the problem of urinary incontinence. Urinary incontinence is a dysfunction that affects about 350 million people worldwide and which, according to estimates, will affect more than 400 million people in 2018. This is a problem that affects people of both sexes for several reasons including prostatectomy and bladder removal following tumors. In addition, urinary incontinence and, in general, voluntary control of urination are common problems for para and tetraplegic patients.
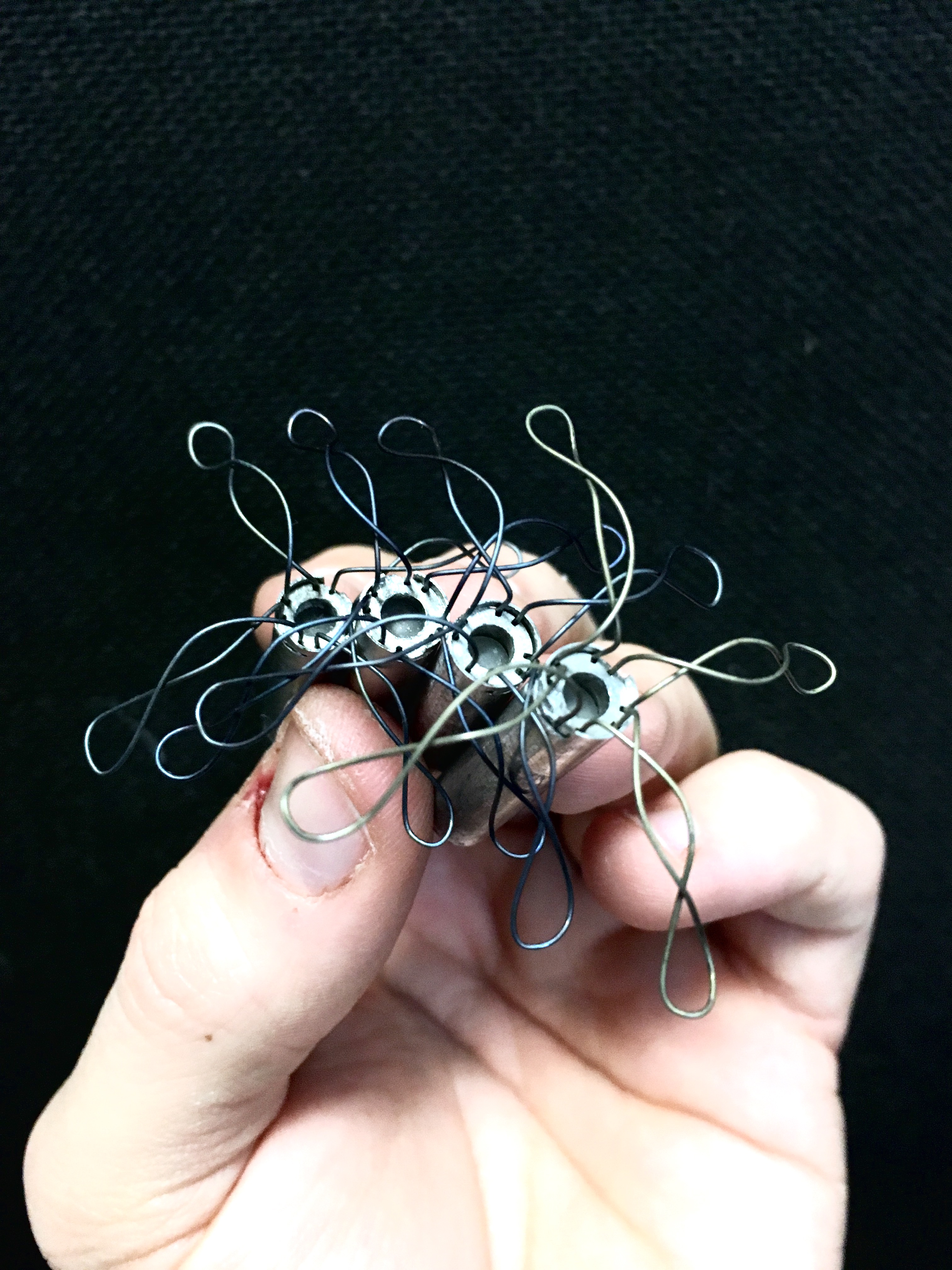
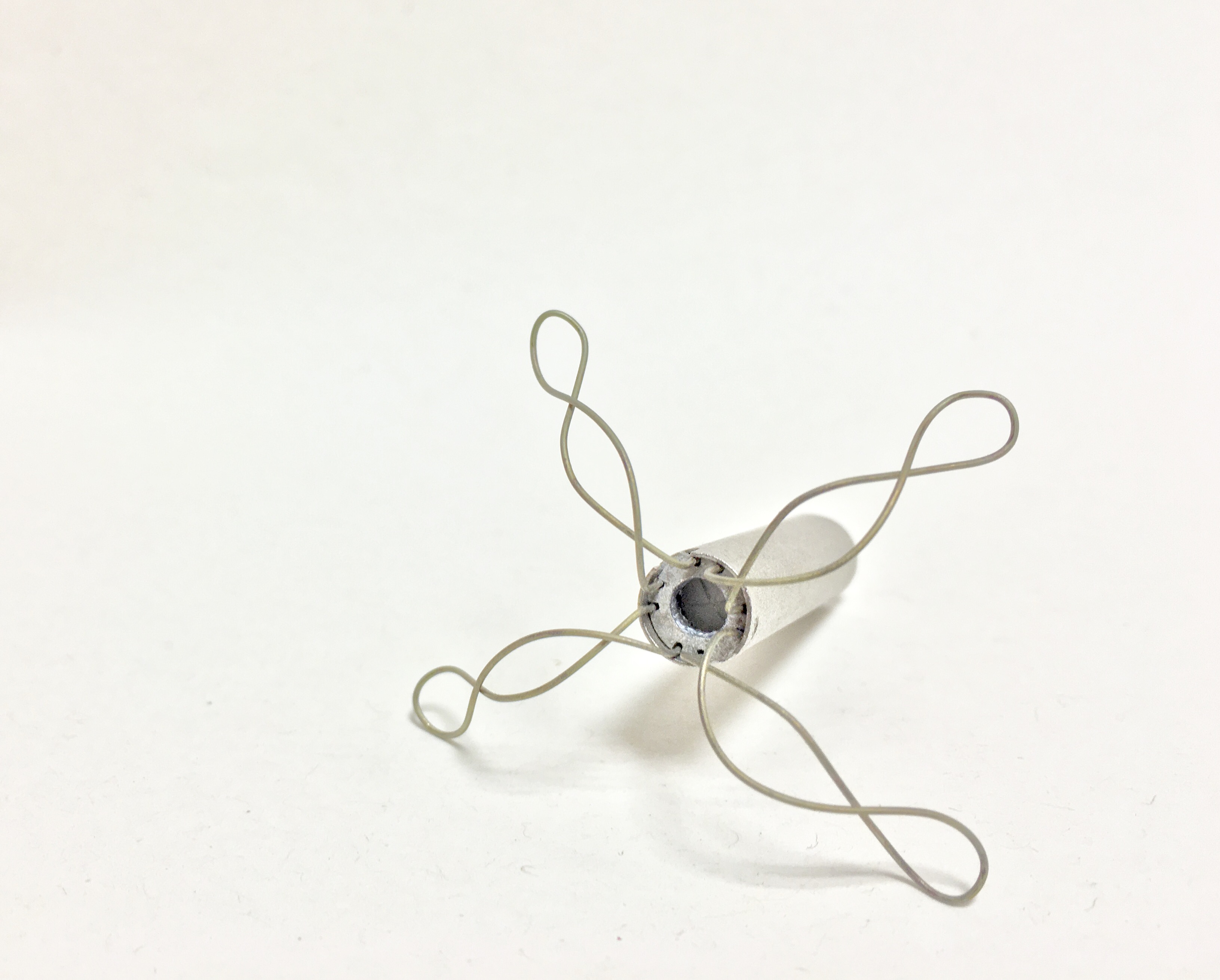
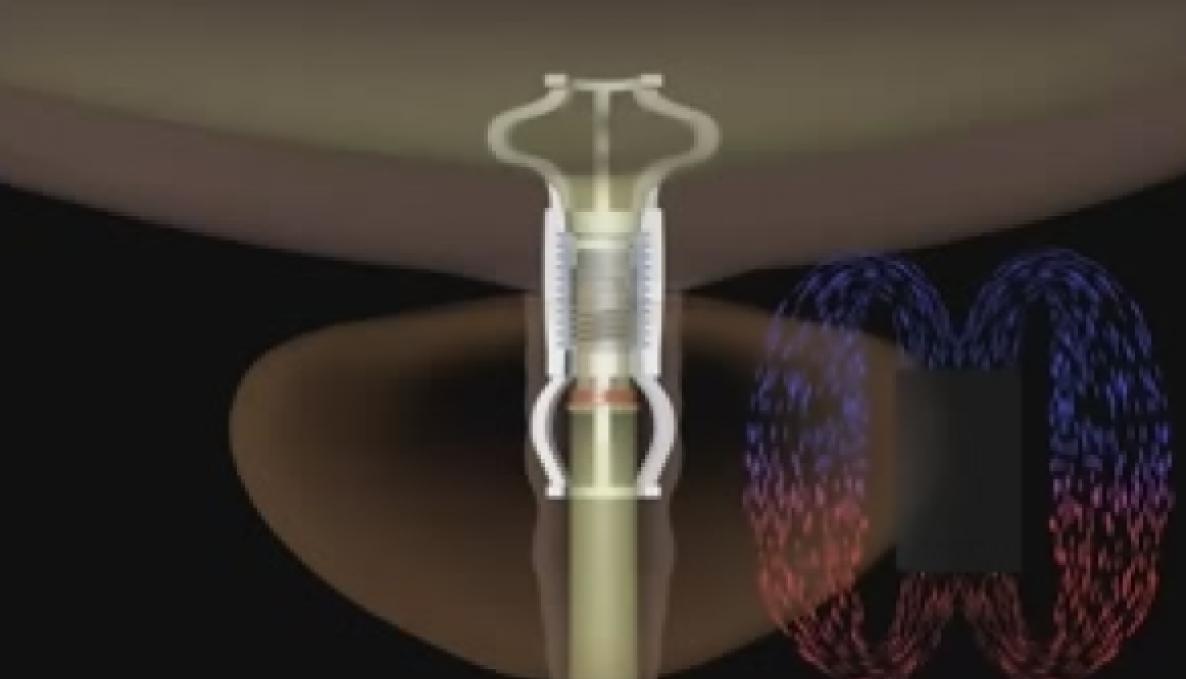
In particolar, the RELIEF project proposes, within 3 years, to engineer and certificate advanced prototypes of artificial sphincters. During the project two different solutions will be studied: a device to be inserted into the urethra (endouretral system) and a device to be positioned outside the urethral channel (extraurethral system). The first solution consists of an unidirectional polymeric valve that can be activated and deactivated by means of an external magnet. The second solution consists of a magnetic mechanism that guarantees continence by compression of the urethra and allows urination when required, deactivating this mechanism from the outside. The goal is to produce a device that is much simpler and much less invasive than currently available spinal urine (eg. AMS800).
RELIEF will benefit from the expertise of the Surgical Robotics and Allied Technical Area of the BioRobotics Institute, which has long-lasting experience in the development of mechatronic devices for both acute and chronic therapy. The RELIEF work group is also involved in the development of other artificial organs, such as artificial pancreas and artificial bladder.
Principal Investigators
Prof. Arianna Menciassi
Ing. E. Gruppioni
Dot.ssa Simona Castellano
Publications
- A. Menciassi, L. Ricotti, G. Lucarini, T. Mazzocchi, L. Marziale, E. Gruppioni, F. Prata, R. Scarpa and R. Papalia (2021). A magnetic endourethral sphincter against stress urinary incontinence: a preliminary pilot study on humans. ESAO-IFAO Congress 2021, accepted.
- T. Mazzocchi, G. Lucarini, I. Roherer, A. Menciassi and L. Ricotti (2021). PDMS and DLC-coated unidirectional valves for artificial urinary sphincters: opening performance after 126 days of immersion in urine. Journal of Biomedical Materials Research: Part B - Applied Biomaterials, under revision.
- L. Marziale, G. Lucarini, T. Mazzocchi, L. Ricotti, and A. Menciassi, (2020). Comparative analysis of occlusion methods for artificial sphincters. Artificial organs, 44(9), 995-1005.
- L. Marziale, G. Lucarini, T. Mazzocchi, E. Gruppioni, A. Davalli, R. Sacchetti, D. Pistolesi, L. Ricotti, and A. Menciassi (2017). Artificial sphincters to face urinary incontinence: a review. Artificial Organs, 42(9), E215-E233.
- G. Lucarini, T. Mazzocchi, L. Marziale, L. Ricotti, A. Menciassi, (2019) Magnetically-controlled artificial urinary sphincters for severe urinary incontinence. 12th EUGA Annual Congress, October 2019.
- G. Lucarini, T. Mazzocchi, L. Marziale, L. Ricotti, A. Menciassi, (2018) Magnetically-controlled artificial urinary sphincters for severe urinary incontinence. 7th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics.
- A. Menciassi, L. Ricotti, V. Iacovacci, G. Lucarini (2018) Implantable Mechatronic Technologies for the Urinary System. 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, July 2018.
- G. Lucarini, L. Marziale, L. Ricotti, A. Menciassi, C. Polito, A. Tognarelli, T. Di Vico, D. Pistolesi (2018). Magnetically-controlled artificial urinary sphincters. 42° Congresso Nazionale SIUD, Naples, June 2018, abstract published on Neurology and Urodynamics Journal, 37 (S3).
- L. Marziale, G. Lucarini, T. Mazzocchi, L. Ricotti and A. Menciassi (2018) Wireless monitoring of a magnetic endo-urethral artificial urinary sphincter. In Proc. Of the National Congress of the Italian Group of Bioengineering (GNB) 2018, Milan, Italy, June 2018.
- K. Al Adem, S. S. Bawazir, K. Alameri, G. Lucarini, T. Mazzocchi, C. Stefanini, P. Dario, and A. Menciassi (2018) A Bionic Sphincter for Stress Urinary Incontinence: Design and Preliminary Experiments. International Conference on Intelligent Human Systems Integration. Springer, Cham, 2018.
- G. Lucarini, T. Mazzocchi, L. Marziale, L. Ricotti, and A. Menciassi (2017) Magnetically-controlled artificial urinary sphincters for severe urinary incontinence. 2017 IEEE International Conference on Cyborg and Bionic Systems.
- T. Mazzocchi, G. Lucarini, L. Marziale, P. Dario, L. Ricotti and A. Menciassi (2017) Magnetically-controlled artificial urinary sphincters. ESAO-IFAO Congress, Vienna, Austria, 6-9 September 2017.
- Cardona, A., Iacovacci, V., Mazzocchi, T., Menciassi, A., & Ricotti, L. (2018). Novel nanostructured coating on PDMS substrates featuring high resistance to urine. ACS Applied Bio Materials, 2(1), 255-265.