Surgical Robotics and Allied Technologies Area
Identify enabling technologies and develop solutions for addressing the field of minimally invasive surgery, targeted therapy and diagnosis

Researchers in this area investigate problems, identify enabling technologies and develop solutions for addressing the field of minimally invasive surgery, targeted therapy and diagnosis.
The main scientific problem to address is covering the gap between diagnosis and therapy, by blending together competences coming from robotics and bioengineering and by developing platforms, enabling technologies and components with the ability to treat many pathologies in the human body, including in hard-to reach areas (e.g. in the cardiovascular system, in the respiratory apparatus, in the central nervous system, in the abdominal cavities, etc.). Treating chronic diseases with a bio-mechatronic approach is also included in this vision of targeted therapy.
The Area is involved in the REPAIR Lab, promoted by INAIL, Centro Protesi in Budrio (Italy) and it has also promoted a Joint Lab for the training of healthcare operators in neonatal applications by mechatronic solutions.
More specifically, the Area is exploring the following research paths, also shared with the Labs of the Area.
Advanced Robotic Devices for Diagnosis and Targeted Therapy
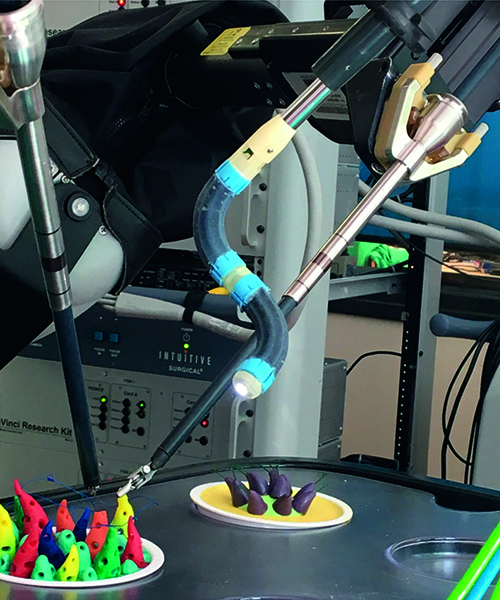
This research line collects all projects devoted to the development of robots, capsules, instrumented catheters, and probes able to operate and navigate in the human body for diagnostic and therapeutic applications. Therapy and diagnosis can be performed in the human abdomen, in the cardiovascular system, in the gastrointestinal tract, but also in other hard-to-reach districts. The typical size of devices entering the human body ranges between 10 cm and tens of microns, depending on the target area and the patient (which can be an adult as well as a child before delivery).
Bio-Mechatronic artificial organs
Targeted therapy means also treatment of chronic diseases and physical disabilities. This research line aims to develop technologies to support impaired organs or replace compromised functionalities.
As current case-studies regarding chronic diseases, we are considering biomechatronic implanted devices for insulin delivery in Type 1 diabetes patients and for the restoration of the urinary system functionalities (both bladder and urinary sphincters). Soft implantable actuators, wireless magnetic activations, on board powering systems, in body communication and sensors are hot topic under exploration.
Regarding physical disabilities, different actuation and sensor technologies are under exploration to design a new advanced prosthetic socket, able to self-adapt to residual limb volume and shape variations in time and in a closed-loop fashion with a sensorised prosthetic liner.
Enabling Technologies (e.g. nanotransducer and bio-hybrid devices)
This research line includes a broad range of novel technological solutions aiming at significantly improving or even revolutionizing the possibilities and performances of current sensors, actuators and mechatronic systems. Such solutions rely on the development and assembly of smart materials and micro/nano-particles, also exploiting some intriguing properties of these systems (e.g. piezoelectricity) and on the integration of living cells and tissues within bioartificial structures, towards the development of bio-hybrid systems.
Principal Investigator
Prof. Arianna Menciassi
e-mail: arianna.menciassi@santannapisa.it
Phone: 050-883418
Recent publications
For a complete full list of publications co-authored by Arianna Menciassi, please check here:
- V. Iacovacci, I. Tamadon, E. F. Kauffmann, S. Pane, V. Simoni, L. Marziale, M. Aragona, L. Cobuccio, M. Chiarugi, P. Dario, S. Del Prato, L. Ricotti, F. Vistoli, A. Menciassi, A fully implantable device for intraperitoneal drug delivery refilled by ingestible capsules, Science Robotics 6, eabh3328 (2021);
- L. Paternò, M. Ibrahimi, E. Rosini, G. Menfi, V. Monaco, E. Gruppioni, L. Ricotti, A. Menciassi, Residual limb volume fluctuations in transfemoral amputees, Scientific reports 11 (1), 1-11, 2021;
- S. Maglio, C. Park, S. Tognarelli, A. Menciassi, ET Roche, High fidelity physical organ simulators: from artificial to bio hybrid solutions, IEEE Transactions on Medical Robotics and Bionics, 2021/3/4;
- S. Pane, V. Iacovacci, E. Sinibaldi, A. Menciassi, Real-time imaging and tracking of microrobots in tissues using ultrasound phase analysis, Applied Physics Letters 118 (1), 014102;
- V. Iacovacci, I. Tamadon, M. Rocchi, P. Dario, A. Menciassi, Toward dosing precision and insulin stability in an artificial pancreas system, Journal of Medical Devices, Transactions of the ASME, 13(1),011008, 2019;
- L. Paternò, G. Tortora, A. Menciassi, Hybrid soft-rigid actuators for minimally invasive surgery, Soft Robotics, 5(6), pp. 783-799, 2018;
- L. Paternò, M. Ibrahimi, E. Gruppioni, A. Menciassi, L. Ricotti, Sockets for limb prostheses: A review of existing technologies and open challenges, IEEE Transactions on Biomedical Engineering, 65(9),8267041, pp. 1996-2010, 2018;
- V. Iacovacci, L. Ricotti, E. Sinibaldi, G. Signore, F. Vistoli, A. Menciassi, An Intravascular Magnetic Catheter Enables the Retrieval of Nanoagents from the Bloodstream, Advanced Science, 5(9),1800807, 2018;
- L. Marziale, G. Lucarini, T. Mazzocchi, L. Ricotti, A. Menciassi, Artificial Sphincters to Manage Urinary Incontinence: A Review, Artificial Organs, 42(9), pp. E215-E233, 2018;
- M. Cianchetti, C. Laschi, A. Menciassi, P. Dario, Biomedical applications of soft robotics, Nature Reviews Materials 3(6), pp. 143-153, 2018;
- G. Lucarini, V. Iacovacci, P.J. Gouveia, L. Ricotti, A. Menciassi, Design of a novel magnetic platform for cell manipulation, Journal of Micromechanics and Microengineering, 28(2),025009, 2018;
- A. Diodato, A. Cafarelli, A. Schiappacasse, S. Tognarelli, G. Ciuti, A. Menciassi, Motion compensation with skin contact control for high intensity focused ultrasound surgery in moving organs, Physics in Medicine and Biology, 63(3),035017, 2018;
- L. Ricotti, B. Trimmer, A. W. Feinberg, R. Raman, K. K. Parker, R. Bashir, M. Sitti, S. Martel, P. Dario, A. Menciassi, Biohybrid actuators for robotics: A review of devices actuated by living cells, Science Robotics, 2(12),eaaq0495, 2017;
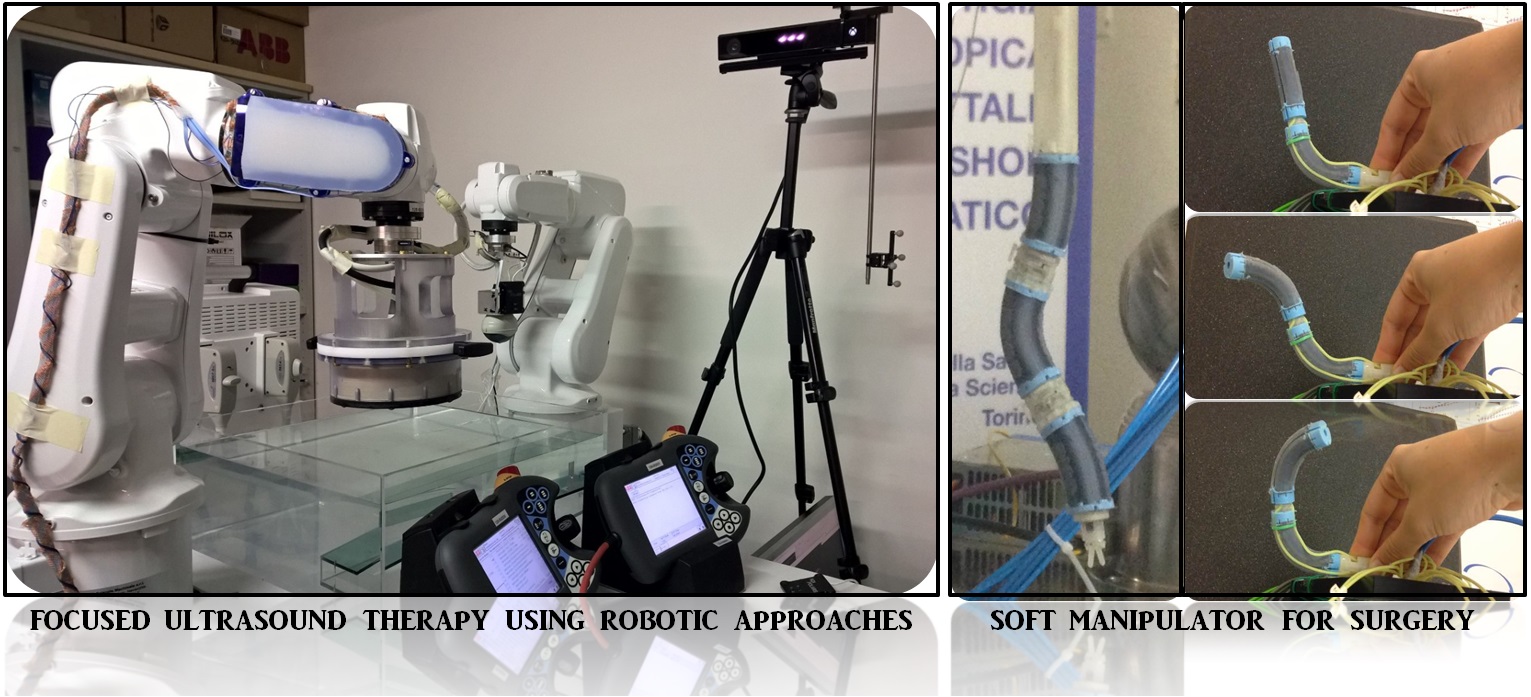
- I. De Falco, M. Cianchetti, A. Menciassi, A soft multi-module manipulator with variable stiffness for minimally invasive surgery, Bioinspiration and Biomimetics, 12(5),056008, 2017;
- T. Mazzocchi, L. Ricotti, N. Pinzi, A. Menciassi, Magnetically Controlled Endourethral Artificial Urinary Sphincter, Annals of Biomedical Engineering, 45(5), pp. 1181-1193, 2017;
- A. Cafarelli, A. Verbeni, A. Poliziani, Tuning acoustic and mechanical properties of materials for ultrasound phantoms and smart substrates for cell cultures, Acta Biomaterialia, 49, pp. 368-378, 2017;
- I. Baldoli, S. Tognarelli, F. Vangi, D. Panizza, R. T. Scaramuzzo, A. Cuttano, C. Laschi, A. Menciassi, An active simulator for neonatal intubation: Design, development and assessment, Medical Engineering and Physics, 39, pp. 57-65, 2017;
- L. J. Slikler, G. Ciuti, M. E. Rentschler, A. Menciassi, Frictional resistance model for tissue-capsule endoscope sliding contact in the gastrointestinal tract, Tribology International,102, pp. 472-484, 2016.
Active or recent grants
International grants
- REGO “Cognitive robotic tools for human-centered small-scale multi-robot operations”, international grant funded by the European Commission through the research and innovation programme Horizon Europe. REGO will develop magnetic multi-robot motion control systems, autonomous swarm control techniques for micro-sized robots, human-robot haptic-centered interfaces, and cognitive shared-control techniques.
- MAPWORMS “Mimicking Adaptation and Plasticity in WORMS”, international grant funded by the European Commission through the research and innovation programme Horizon Europe. MAPWORMS will develop a new generation of bioinspired, soft, small-scale robots able to respond to external stimuli and to adapt to the working environment.
- ARTERY "Autonomous Robotics for Transcatheter dEliveRy sYstems", international grants funded by European Commission through the research and innovation programme Horizon 2020;
- DIH-HERO "Digital Innovation Hub in Healthcare Robotics", aimed at exploiting robotics in the healthcare sector;
- ATLAS "AuTonomous intraLuminAl Surgery", a Marie Curie European Joint Doctorate school that targets the training of experts in a very specific branch of Robotic Surgery;
National grants
- BRIEF - Biorobotics Research and Innovation Engineering Facilities - Project funded under the National Recovery and Resilience Plan (NRRP), Mission 4 Component 2 Investment 3.1 – Fund for the implementation of an integrated system of research and innovation infrastructures – of Italian Ministry of University and Research funded by the European Union – NextGenerationEU; Project identification code IR0000036, Concession Decree No. 3262 of 28/12/2021 adopted by the Italian Ministry of University and Research, CUP J13C22000400007, “Biorobotics Research and Innovation Engineering Facilities” (BRIEF).
- INAIL - MOTU - The project is devoted to the development and assessment of a new lower limb prosthesis with bi-directional control interface. The Area team is developing a smart socket for the prosthesis;
- INAIL - RELIEF - The project is focused on the design and implementation of an artificial sphincter based on magnetic actuation for urinary incontinence;
- INAIL - BIOSUP - innovative and modular solutions for the restoration of urinary function;
Main past grants
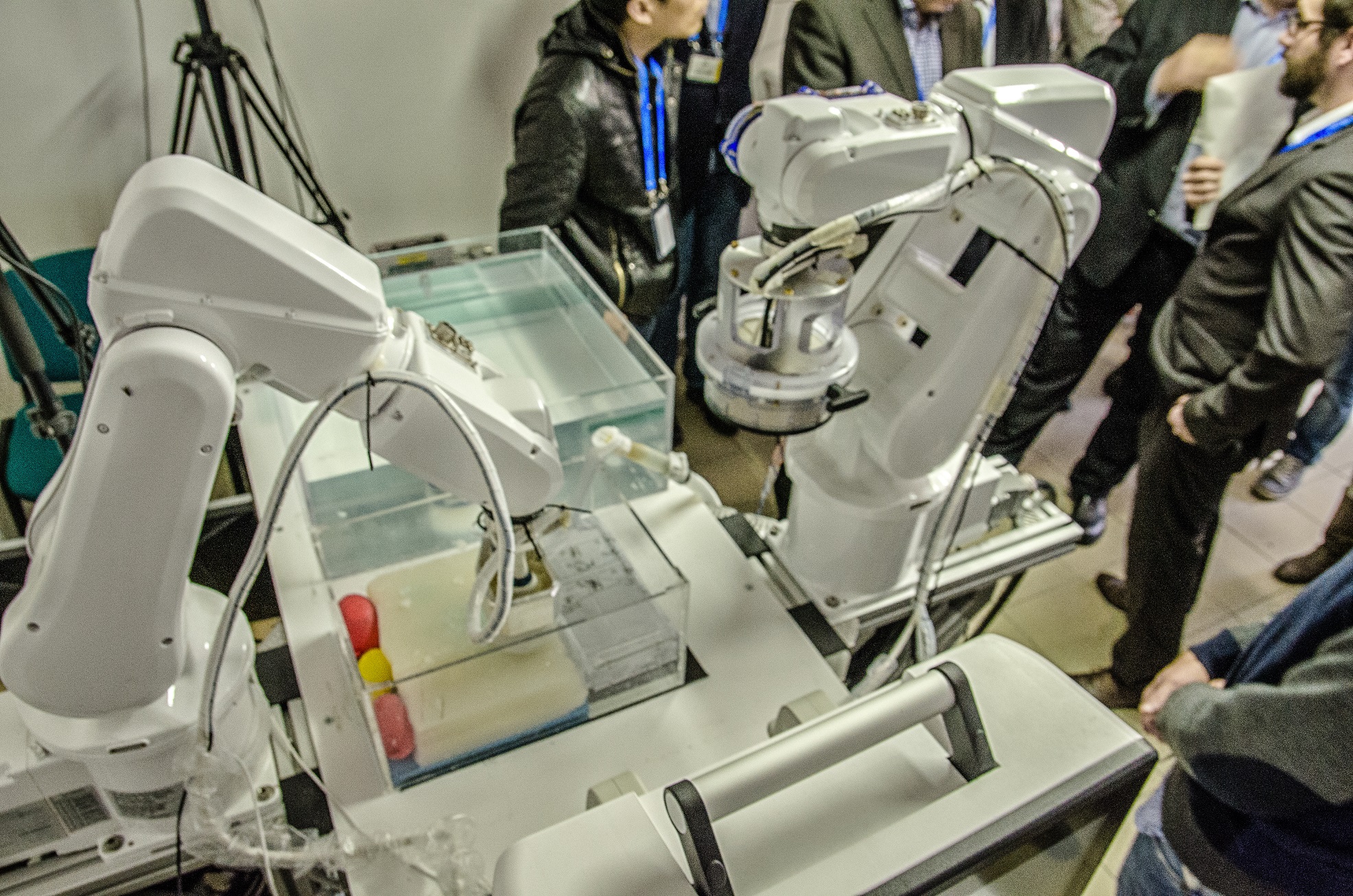
- FUTURA2020 - The project aims at exploiting robotic approaches for improving focused ultrasound therapy, towards clinical translation;
- ENDOVESPA - "Endoscopic Versatile robotic guidance, diagnosis and therapy of magnetic-driven soft-tethered endoluminAl robots", FP7-ICT 24- 688592 - 2015 Robotics - item c. Innovation Actions: Technology transfer;
- ROBOIMPLANT - The project aims to develop a fully implantable long-term artificial pancreas for Type 1 Diabetes patients based mainly on mechatronic technologies;
- S3InNeo - The project aims to develop software and hardware tools for neonatal intubation.
- M2NEURAL - The project has developed technologies for improving peripheral neural interfaces in terms of biocompatibility and US-based drug delivery solutions;
- VALVETECH - The project has developed a flexible and tunable stiffness manipulator for the delivery of an artificial aortic valve in a minimally invasive way;
- IMEROS - In this project, a novel microwave tool has been integrated in the Da Vinci robotic system;
- CAPSULIGHT - This project has developed a gastroscopic capsule for photodynamic therapy;
- FUTURA - The project has introduced robotic technologies in focused ultrasound procedures;
- MICROVAST - This project was aimed to develop a magnetic softly tethered capsule for targeted therapy in the vascular system under US control;
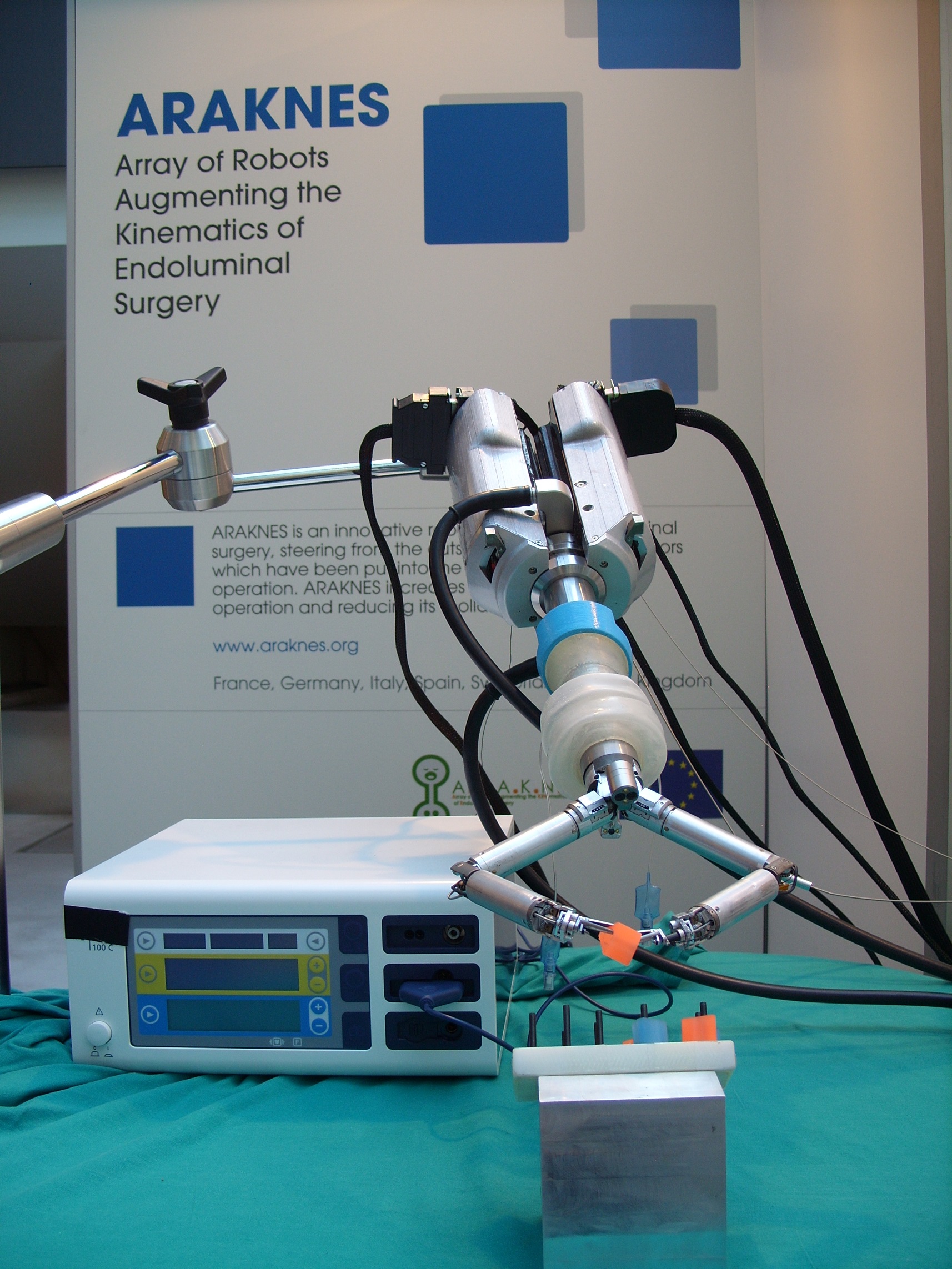
- ARAKNES - This project has developed several modular robots, at different scales, for single port endoluminal surgery;
- STIFF-FLOP - The project has developed soft and tunable stiffness robots for surgical applications.