The new robotic hand from the Sant'Anna School will be tested on people with wrist or forearm amputations
The new robotic hand from the BioRobotics Institute of the Sant'Anna School is ready to be tested on people with wrist or forearm amputations. The Myki project, funded by the European Research Council through an ERC Starting Grant, is drawing to a close. The project aims to develop and clinically evaluate a dexterous hand prosthesis with tactile sensors that is naturally controlled and perceived by the amputee through a machine-person interface system involving the implantation of small magnets. "We have entered the final phase of the project," comments Christian Cipriani, director of the BioRobotics Institute and coordinator of the project. "We are looking for a volunteer to temporarily receive the world's first implant with these characteristics."
The implant will be made at the Azienda Ospedaliera-Universitaria Pisana thanks to the collaboration of a team coordinated by Dr. Lorenzo Andreani of UO Orthopaedics and Traumatology 2. To contact the research team that developed the robotic hand, ask for information about the project and apply as a volunteer, please send an e-mail to: myki@santannapisa.it.
The features of the robotic hand developed by Myki
The Myki project (an acronym for 'Bidirectional Myokinetic Implanted Interface for Natural Control of Artificial Limbs') has developed a radically new machine-person interface system, based on magnetic field principles, capable of decoding motor intentions and transmitting sensory feedback to the amputee.
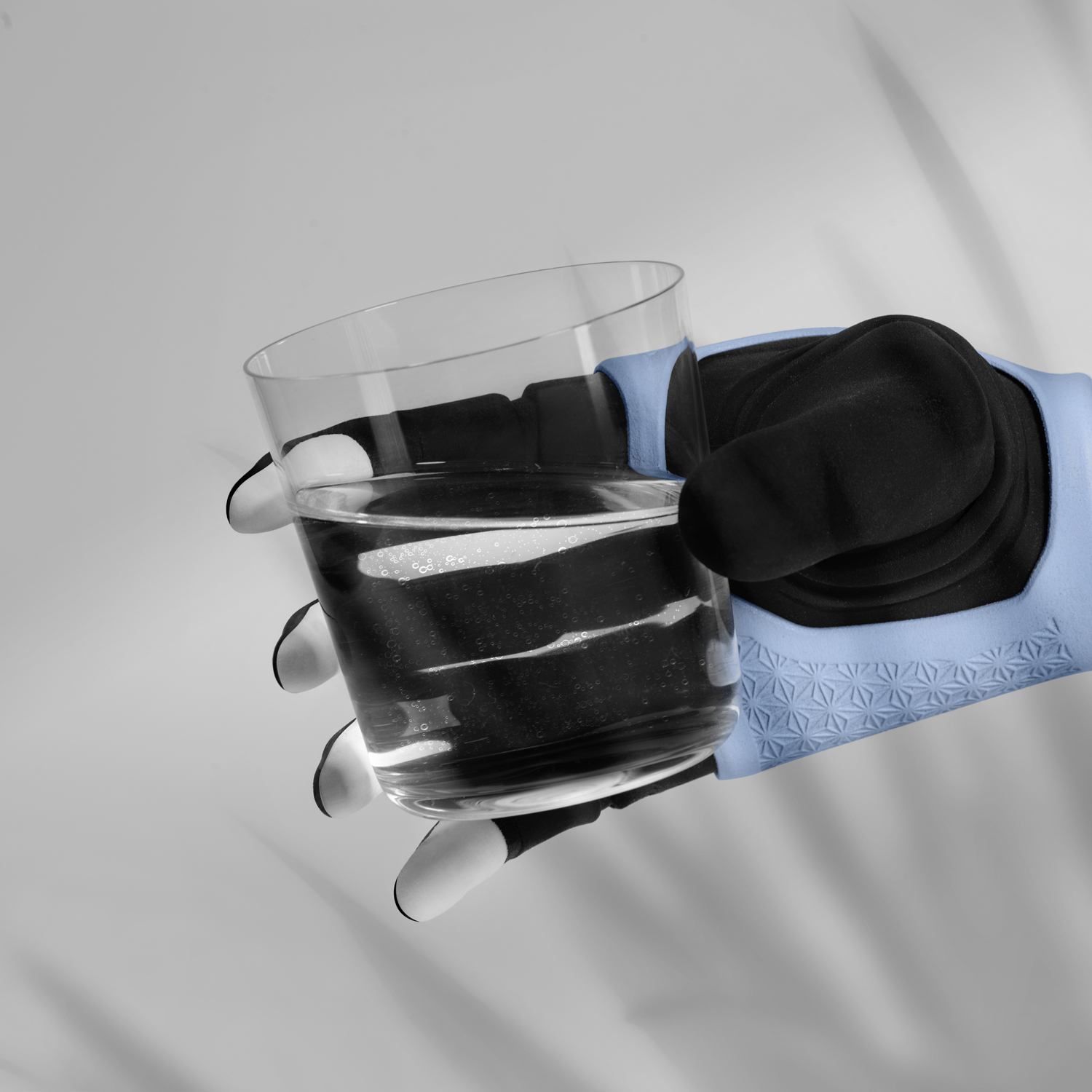
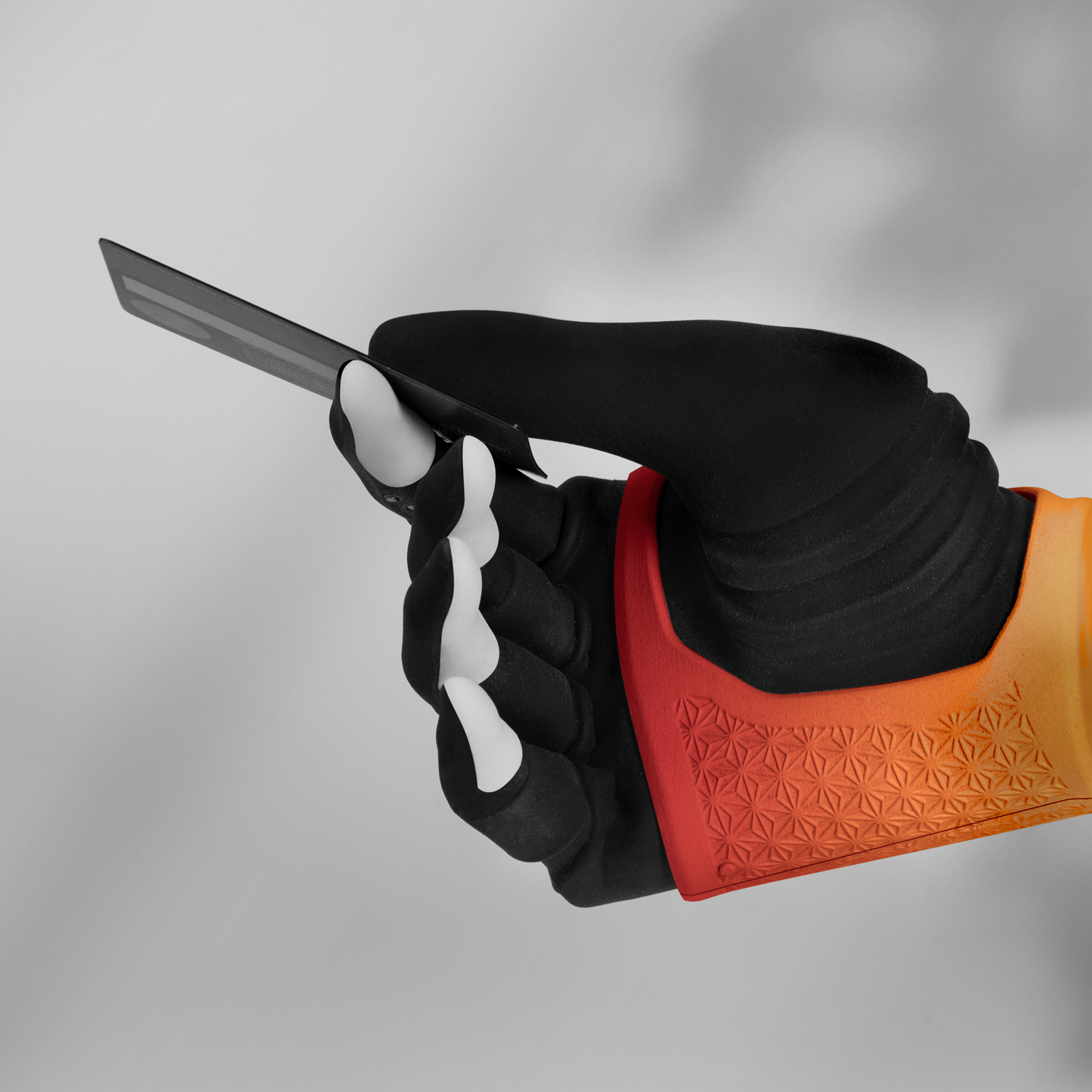
“Our robotic hand is equipped with sensors and actuators – explain Cipriani - Actuators allow to achieve the movement of the thumb, index finger, the last three fingers and the thumb opposition to perform the main grasps used in activities of daily living. Force and position sensors are used to provide tactile feedback to the user”.
The project involves implanting small magnets (a few millimetres in size) at the level of the forearm muscles. Following implantation, the stimuli produced by muscle contraction will result in the magnets moving, which in turn will activate the movements of the robotic hand.
“Through this system - Cipriani continues - we are able to monitor the level of contraction of the residual muscles of an amputee limb during a motor action and consequently move the thumb, index finger, the last three fingers and the thumb opposition of a robotic hand. This combination of movements allows the wearer of the hand to perform the main grasps useful in daily life”.
The robotic hand from the Scuola Superiore Sant'Anna was engineered in collaboration with the spin-off Prensilia, which is working to commercialise the prosthesis by 2023.
The project now enters its final phase, that of human experimentation. The robotic hand control interface will be temporarily tested on people with upper limb amputation at wrist or forearm level. The trial will be conducted at the Azienda Ospedaliero-Universitaria Pisana in collaboration with the UO Orthopaedics and Traumatology 2 unit, which will be in charge of the surgical procedure for implanting the magnets.
"So far the results are very promising, we have learnt to control different degrees of freedom of a robotic hand in the laboratory - Cipriani concludes - Now we have entered the final phase of the project and we are looking for a volunteer who can help us advance science and technology in this area”.