Stable and efficient robotic artificial muscles built upon new material combinations: Nature Electronics publishes research from University of Linz, Sant'Anna School and University of Trento. Technological advancement meets environmental sustainability
A groundbreaking method for designing novel soft actuators and robotic artificial muscles with enhanced performance and significantly reduced energy consumption has been developed through a collaboration among international research teams
A groundbreaking method for designing novel soft actuators and robotic artificial muscles with enhanced performance and significantly reduced energy consumption has been developed through a collaboration among international research teams. This collaborative effort has been led by Martin Kaltenbrunner, professor at Soft Matter Physics department, Johannes Kepler University in Linz and Marco Fontana, professor of the Institute of Mechanical Intelligence at Sant'Anna School. Their innovative results, leading to the development of this new method for creating more stable and efficient artificial muscles, have recently been published in the scientific journal Nature Electronics.
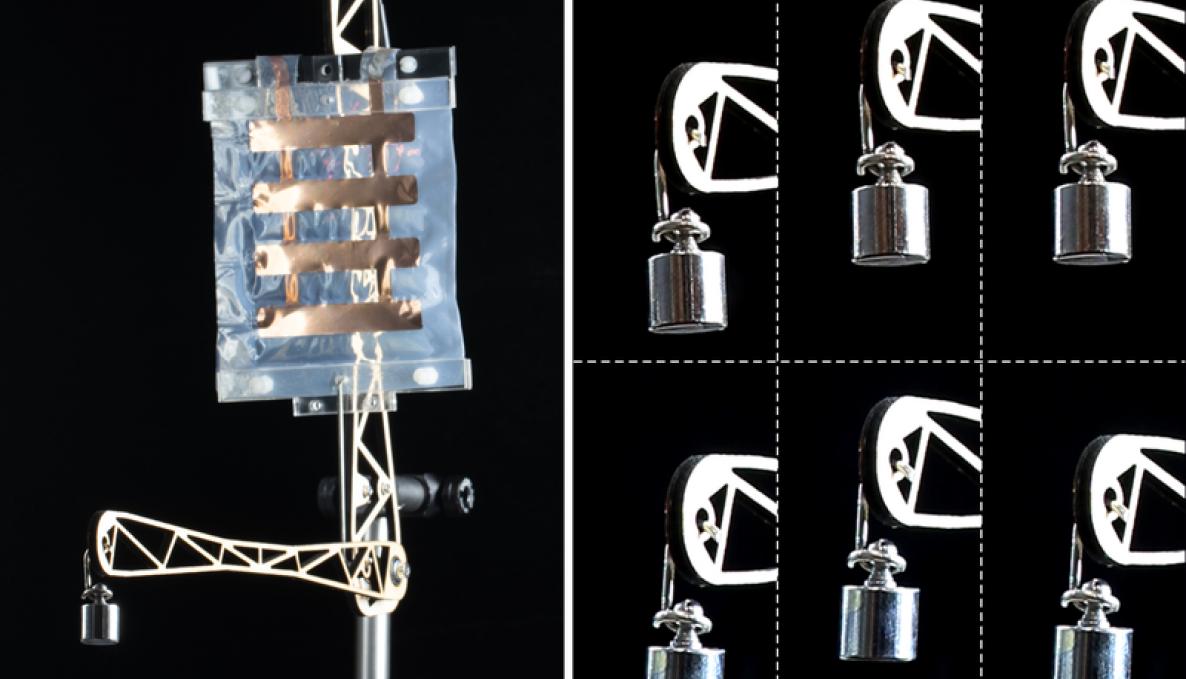
Actuators, which convert electrical energy into motion or force, play a pivotal role in daily life, albeit often going unnoticed. Soft material-based actuators, in particular, have gained scientific attention in recent years due to their lightweight, quiet operation, and biodegradability. A straightforward approach to creating soft actuators involves employing multi-material structures, such as "pockets" made of flexible plastic films filled with oils and coated with conductive plastics. When subjected to electrical activation, the film displaces the fluid and contracts the pocket, similar to a biological muscle. This system can be used to build artificial muscles for robots, adjustable optics, or tactile surfaces. However, until now, applying constant electrical activation only allowed short-term muscle contractions, posing a significant limitation for practical applications.
Researcher Ion-Dan Sîrbu from Sant'Anna School, formerly a doctoral student at the University of Trento under the supervision of Giacomo Moretti and Marco Fontana, began investigating this phenomenon during a research period at Johannes Kepler University in Linz. Together with the Austrian research group, Ion-Dan Sîrbu developed a system enabling accurate force measurement in these actuators. "During my research on common material combinations," Ion-Dan Sîrbu explains, "I also experimented with a plastic film that a fellow doctoral student, David Preninger, used for his work on biodegradable artificial muscles. As soon as we noticed that this material can sustain a constant force for arbitrarily long periods, we realized we had made a significant discovery."
Since then, the team has worked on a theoretical model and conducted in-depth material characterizations. It became apparent that the key experimental results could be accurately described using simple models. "The beauty of our model is its simplicity; it can be explained with high school physics knowledge and is not limited to existing actuators. We believe our results will provide the scientific community with a simple yet powerful tool for designing and investigating new systems," says David Preninger, co-first author of the paper and PhD-student at Soft Matter Physics department at Johannes Kepler University, describing the recently published research in Nature Electronics. "What's interesting is that not only have we made this technology more functional, but our study enables the identification of material combinations that bring up to thousandfold energy consumption reductions" adds Martin Kaltenbrunner.
Utilizing the identified material combinations, scientists have successfully developed and operated various types of artificial muscles, variable gradient optics, and tactile displays. Prof Fontana emphasizes, "Understanding the fundamental mechanisms underlying soft actuators as established by this study has the potential to make a significant leap in the field of assistive devices, automatic machines, and mobile robots for terrestrial, marine, and space exploration. All these sectors are in search of low-cost, high-performance solutions, which shall also be capable of ensuring low consumption and environmental impacts for sustainability."


