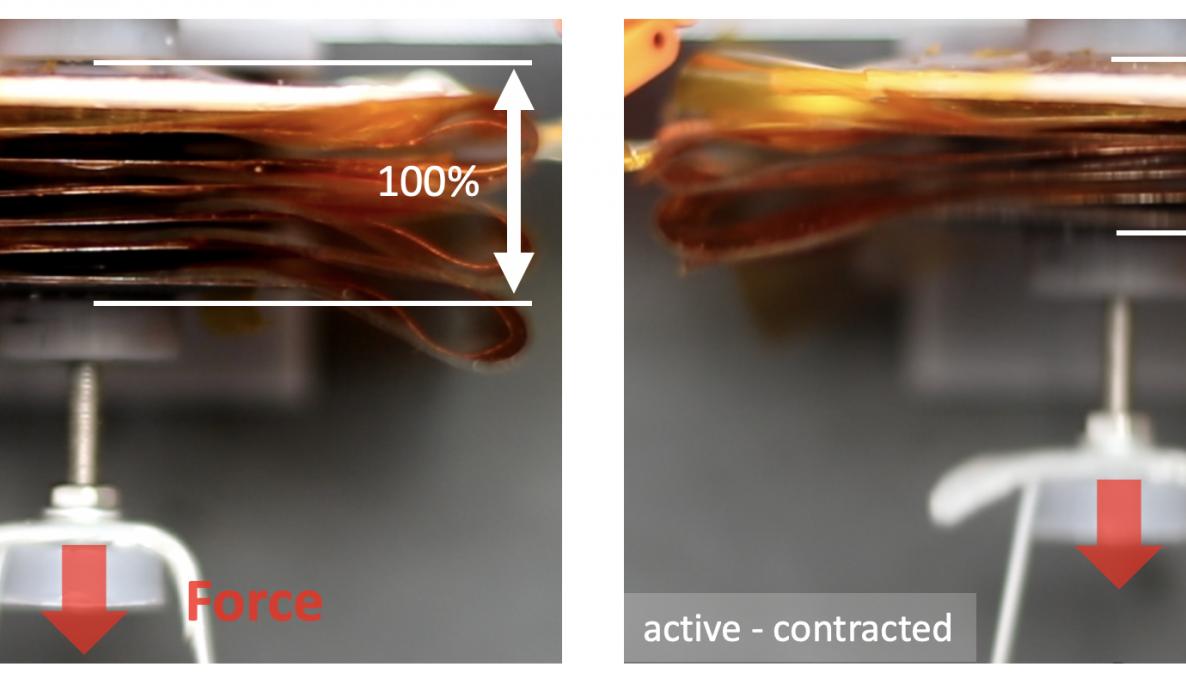
Engineers have developed a new type of artificial muscle; it stretches and contracts of 43% under electrostatic forces and can lift loads over 100 times its weight. This is the result of the work of Percro Lab team, published on “Science Robotics”
An Italian team of researchers lead by Prof. Marco Fontana, head of the Robotic mechanisms and materials group of PERCRO Lab of the TeCIP Insitute , in collaboration with the departments of Industrial Engineering of the Universities of Trento and Bologna, has developed the Electrostatic Bellow Muscle (EBM) a new kind of artificial muscle that can be employed to build effective small-scale robots.
The working principle of EBM is based on a bellow-shaped structure that is similar to that of an accordion bellow that elongates and contracts under the action of the player. Here such a movement is produced by electrostatic attraction forces.
In their paper published in the journal Science Robotics, the group illustrates how this simple concept can be employed to produce actuators in the scale of centimetres that reach very high speed and forces relatively to their dimensions.
Beside their outstanding performance, EBM possessed three attributes that make them particularly interesting for the implementation of robotic and mechatronic systems.
First, they are multifunctional. An EBM is a contractile actuator which similar to a muscle contracts upon electrical stimulus. An EBM can be also employed as a pump, which can supply pressure to a fluid to operate soft and fluidic robots. Finally, it can be a generator that makes it possible to recycle energy in braking phases to improve the duration of battery.
Second, the EBM is based on a modular architecture in which several actuators can be arranged in dense arrays providing several combinations of force and displacement. This makes it possible to use them for the actuation of robots and mechatronic systems that require different type and range of motions. Third, EBMs are an extremely low-cost technology of actuation.
The research team is now looking for a further improvement of the EBM performance, through the use of new functional and structural materials, and through the development advanced manufacturing process, which could make the EBMs’ fabrication even quicker and cheaper. The group is now looking to broaden their consortium, involving industrial partners interested in making EBM a real-world product in the future.


