Nuovo tipo di muscolo artificiale: si allunga e si contrae per forze di attrazione elettrostatica, può sollevare carichi oltre 100 volte il suo peso. Su “Science Robotics” il risultato del lavoro di team del Percro Lab dell’Istituto TeCIP del Sant'Anna
Un nuovo tipo di muscolo artificiale che può essere impiegato per il movimento di robot di piccole dimensioni è stato sviluppato da un team di ricercatori guidato da Marco Fontana, docente leader del gruppo “Robotic mechanisms and materials” del Laboratorio di Robotica Percettiva dell’Istituto TeCIP (Tecnologie della Comunicazione, Informazione, Percezione) della Scuola Superiore Sant'Anna, insieme a colleghi dei Dipartimenti di Ingegneria Industriale delle Università di Trento e di Bologna. Il principio di funzionamento di questo nuovo tipo di muscolo artificiale - in inglese Ebm, acronimo di Electrostatic bellow muscle - si basa su una struttura che ricorda il mantice di una fisarmonica che il musicista fa allungare e contrarre. Nel caso dell'Ebm questo movimento è invece prodotto da forze di attrazione elettrostatica.
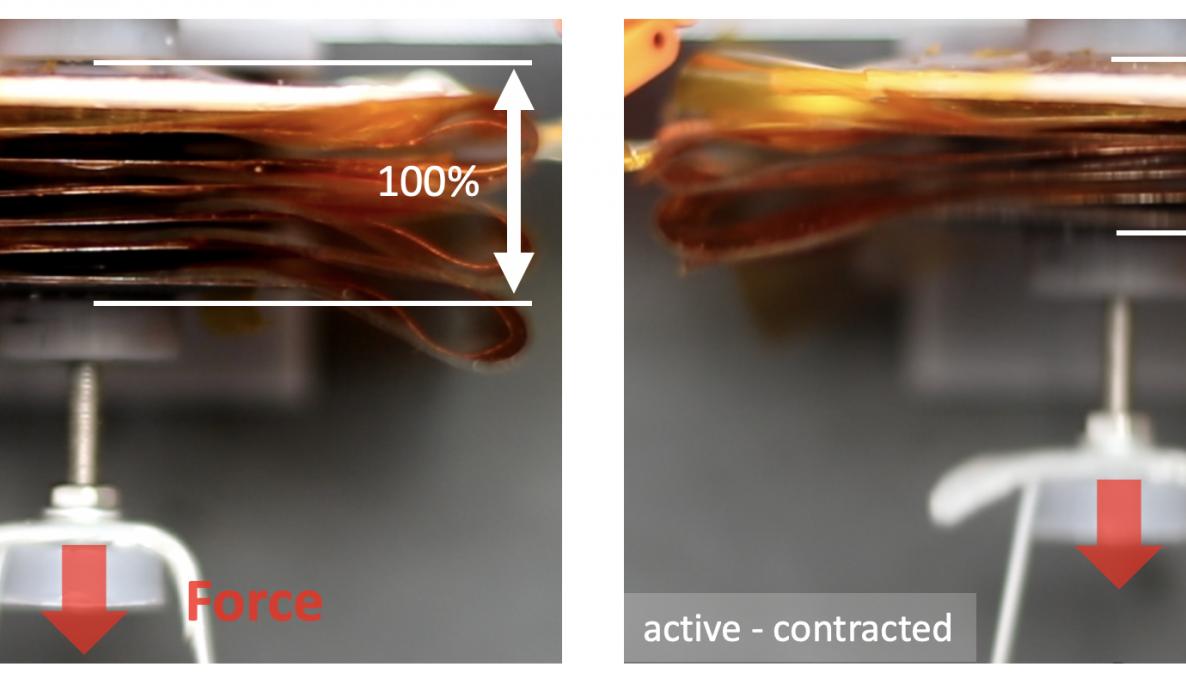
La nuova tecnologia è stata presentata in un articolo pubblicato sulla rivista “Science Robotics”. Il gruppo di ricercatori spiega come il concetto alla base (una struttura che ricorda il mantice di una fisarmonica) può essere impiegato per produrre muscoli artificiali con dimensioni di pochi centimetri dalle caratteristiche simili a quelle dei muscoli umani, che raggiungono velocità e dimostrano forze molto elevate rispetto alle loro dimensioni. Possono infatti sollevare carichi fino a 100 volte il loro peso. Questi innovativi “muscoli artificiali” possiedono tre caratteristiche che i ricercatori definiscono “molto promettenti” per realizzare nuovi sistemi robotici ma anche per diverse altre applicazioni.
La prima caratteristica dell'Ebm è la sua “multifunzionalità”, ossia la capacità di integrare, in unico sistema, funzionalità che di solito richiedono diversi dispositivi. L’Ebm si contrae sulla base di uno stimolo elettrico, ma può essere impiegato anche come una pompa, che fa circolare un fluido per dare movimento, ad esempio, a un robot. Al tempo stesso, il muscolo artificiale può anche diventare un generatore che permette di riciclare l'energia durante le fasi di frenata, aumentando la durata della batteria del sistema, proprio come avviene per le auto elettriche. In seconda istanza, questi muscoli sono versatili perché, grazie alla loro struttura modulare, hanno la capacità di essere adattati con facilità a diverse tipologie e specifiche di movimento. Infine, come terza caratteristica, questi muscoli rappresentano una tecnologia di attuazione (movimento) a basso costo in quanto le sottili pellicole di materiale polimerico (plastiche) impiegate per realizzarli risultano assai economiche e i relativi processi di fabbricazione sono replicabili su larga scala per avviare una produzione in serie.
“A oggi siamo impegnati – spiega Marco Fontana a nome del team di ricerca - in un ulteriore miglioramento delle prestazioni di questi dispositivi con l'utilizzo di nuovi materiali, come polimeri biodegradabili ad alte prestazioni, e attraverso lo studio di processi di fabbricazione avanzati. Stiamo già dialogando e valutando collaborazioni con varie aziende”.


