SOFT ROBOTICS: SILVER, A SEABED-INTERACTION LEGGED VEHICLE DEVELOPED BY SANT’ANNA SCHOOL BIOROBOTICS INSTITUTE FOR UNDERWATER DELICATE EXPLORATION IS CAPABLE OF ADAPTing TO CHANGING SEABED SOIL
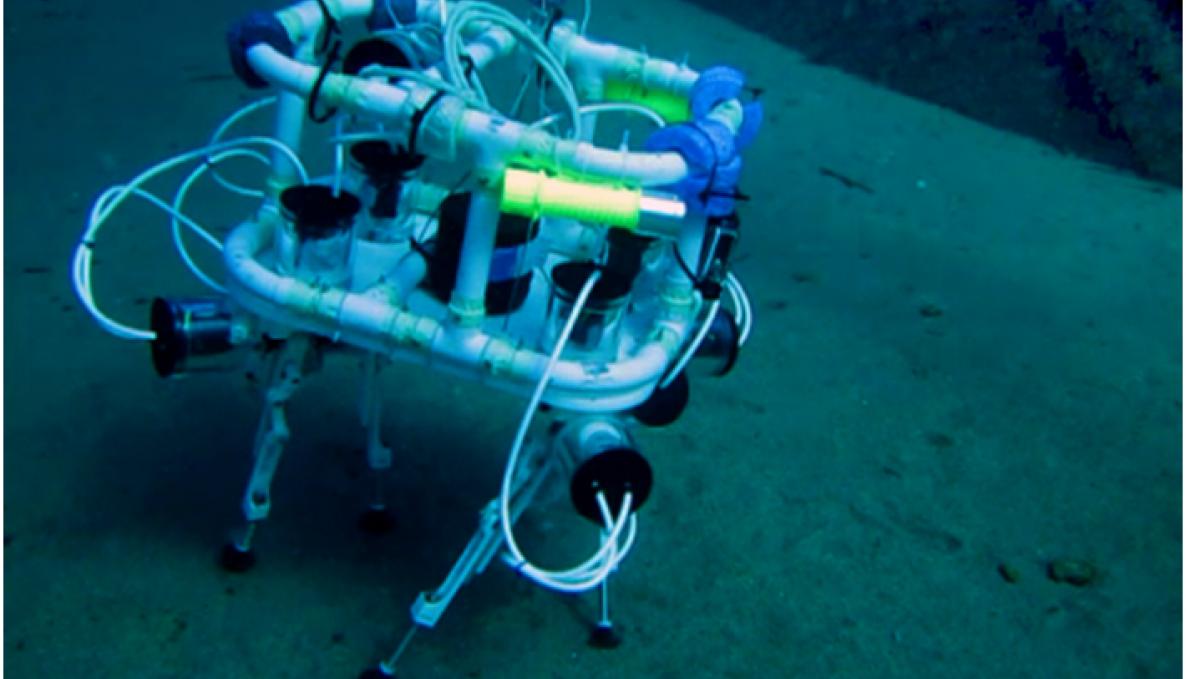
Researchers of the Biorobotics Institute at Sant’Anna School have created SILVER (Seabed-Interaction Legged Vehicle for Exploration and Research), a robot that walks along the seafloor and looks like a dog. This robot is able to explore the depth of the sea and adapt to changing seabed soil thanks to its crab-like agile legs.
The SILVER Project received the National Geographic Society Early Career Grant. Marcello Calisti is the project scientific coordinator who recently completed a field trial off the Coast of Elba Island.
“The SILVER robot - said Calisti, will eventually become a useful tool for biologists, geologists, photographers, filmmakers and underwater archaeologists. This bio-inspired robot can hop and jump in broader areas through a spring-loaded mechanism. The spring has a simple structure, energy storage and release, and simple control so the robot can jump through an instantaneous contraction of the spring. The crab-like legs include ankle joints which have good jump performance. Our experiments show that the robot can achieve a smooth jump. Long-exposure images without background blurring demonstrate stability”.
Calisti also envisions that these robots which use legged locomotion to move dexterously on the seafloor, anchor to underwater structures, and gently interact with the environment can provide improved tools to researchers. Silver’s thicker body is designed for icy temperatures: its adaptability to interact with its users (Interactive Machine Learning) in unexpected environments also indicates its potential as a social human-robot interaction.
SILVER was developed in Livorno at the Centro di ricerca sulle tecnologie del mare e la Robotica marina. The research team supervised by Marcello Calisti and Cecilia Laschi has implemented several bioinspired algorithms for autonomous landing of robots.


