NEW IMPROVEMENTS IN THE DEVELOPMENT OF ARTIFICIAL TOUCH THROUGH A SOFT TACTILE SENSOR ABLE TO MEASURE THE INTERACTION WITH OBJECTS AND SURFACES
Measure the intensity and the location of the force during the interaction with an object or surface, through a soft tactile sensor able to adapt to the shape of different robotic systems. The latest improvements in the development of artificial touch, published in Soft Robotics Journal, are now illustrated in the study coordinated by The BioRobotics Institute of Scuola Superiore Sant’Anna and the Italian Institute of Technology, in collaboration with Campus Biomedico Universty of Rome, Politecnico di Milano and Ca’ Foscari University of Venice.
Thanks to the synergies put in place between the PARLOMA project, funded by the Ministry of Education, University and Research, the Imeros project, funded by the Tuscany Region, and the SENSE-RISC project, funded by Inail, the new artificial touch sensor may be used in different fields, such as medical robotics, wearable robotics and collaborative robotics for Industry 4.0.
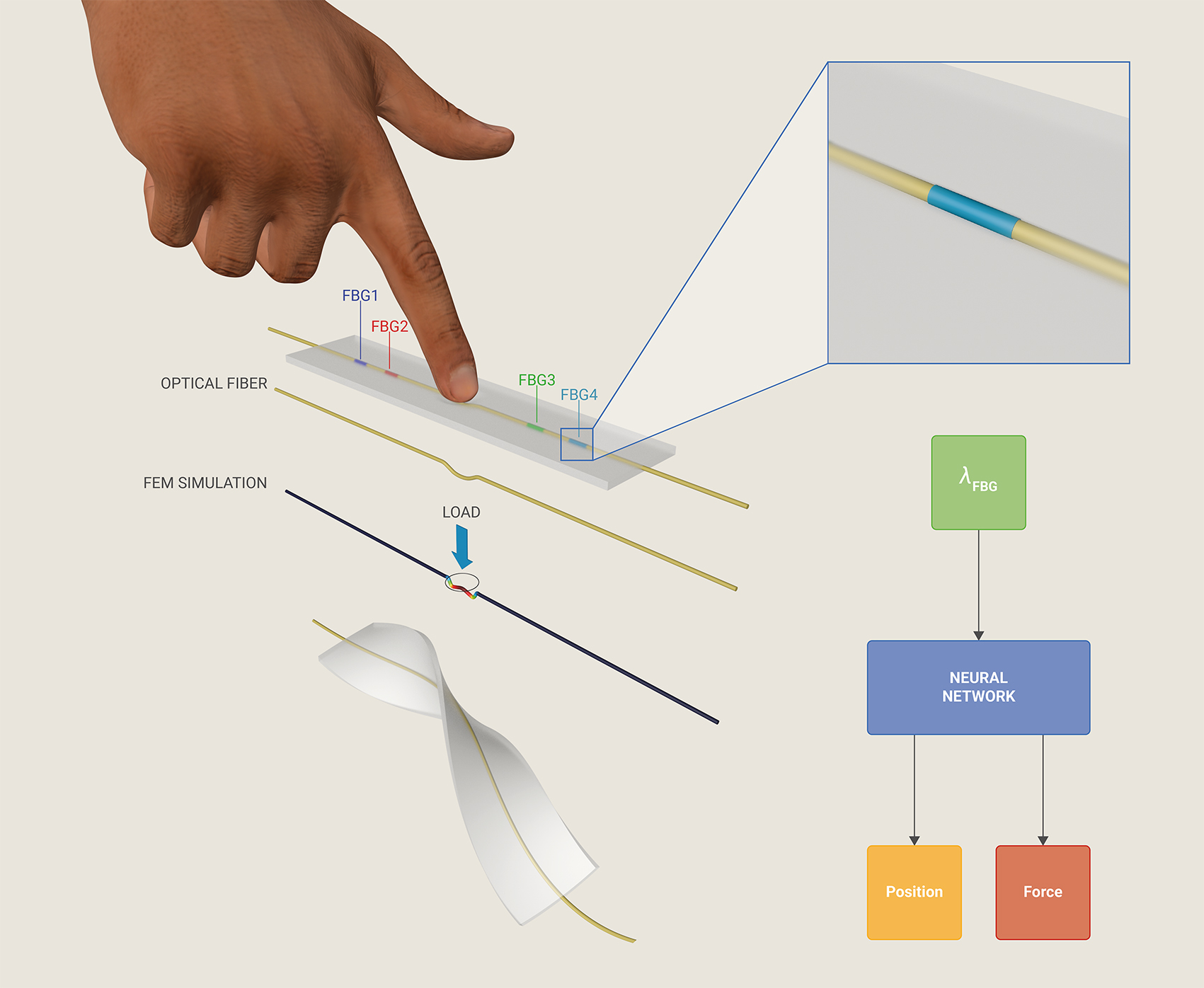
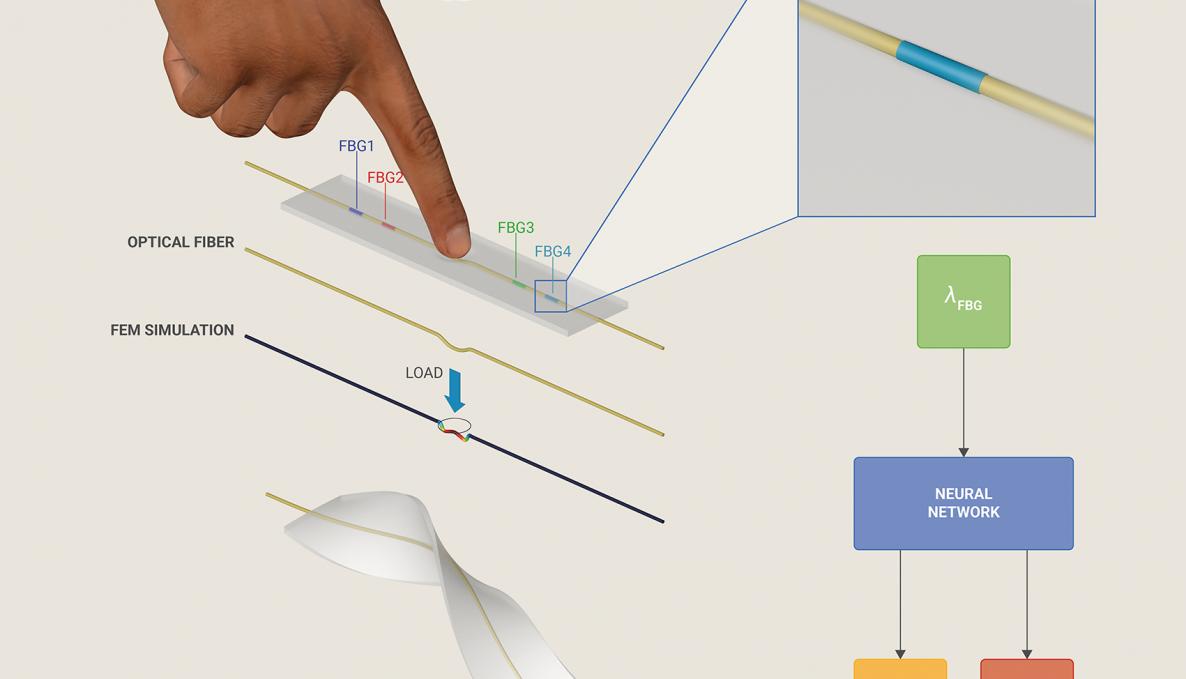
The study, carried out by the Neuro-Robotic Touch Lab of The BioRobotics Institute coordinated by Prof. Calogero Oddo, is based on numerical Finite Element Method (FEM) combined with artificial intelligence, one of the fundamental research themes within the program of Department of Excellence in “Robotics & AI”, approved by MIUR. This method makes it possible to optimize the geometry of the system and to achieve a better accuracy, in order to solve two fundamental aspects in the development of artificial sense of touch: the intensity and the location of the force to make the grip more effective when there is an interaction with an object or surface. This need comes when a robotic system has to grasp a delicate object or, instead, has to dynamically adapt the positions of the fingers.
“The soft tactile sensor – explains Luca Massari, first author of the study, currently post-doc at The BioRobotics Institute and previously research fellow of Ca' Foscari University in Venice – represents an enabling technology for applications fields such as collaborative robotics in medical and manufacturing scenarios. Due to its soft nature, the sensor is intended to be wrapped, twisted and attached on different surfaces while ensuring contact localization and contact force measurement. Furthermore, the use of optical fibers as sensing elements has several advantages such as multiplexing and distributed sensor capabilities, scalability and high sensitivity to strain deformations”.
Edoardo Sinibaldi, researcher of IIT, who co-lead the study by also supervising the development of the numerical model used for optimizing sensor design and training the ML algorithms, remarks the added value brought by the integration between model-based and model-less approaches. Indeed, besides containing experimental data cost, such an integration could support the explainability of AI applications, which is an important open issue for building trust in AI at large (while being useful, in practical scenarios, also for debugging).
“This work, published in an international scientific journal - says Prof. Arianna Menciassi, co-author of the study and Vice-Rector of Scuola Superiore Sant’Anna - confirms the strategic value of the collaboration between Universities and National research institutions of excellence, such as the Italian Institute of Technology, the University Campus Bio-Medico in Rome, Politecnico di Milano and the Ca' Foscari University of Venice. With these institutions, Scuola Superiore Sant’Anna has developed important synergies in the field of bioengineering, robotics, measurement instruments and assistive technologies. It also confirms the value of the synergy between different projects funded at national and international level".
The study can be downloaded freely until February 2, 2020 via this link: http://bit.ly/2rzplbT