MOTU
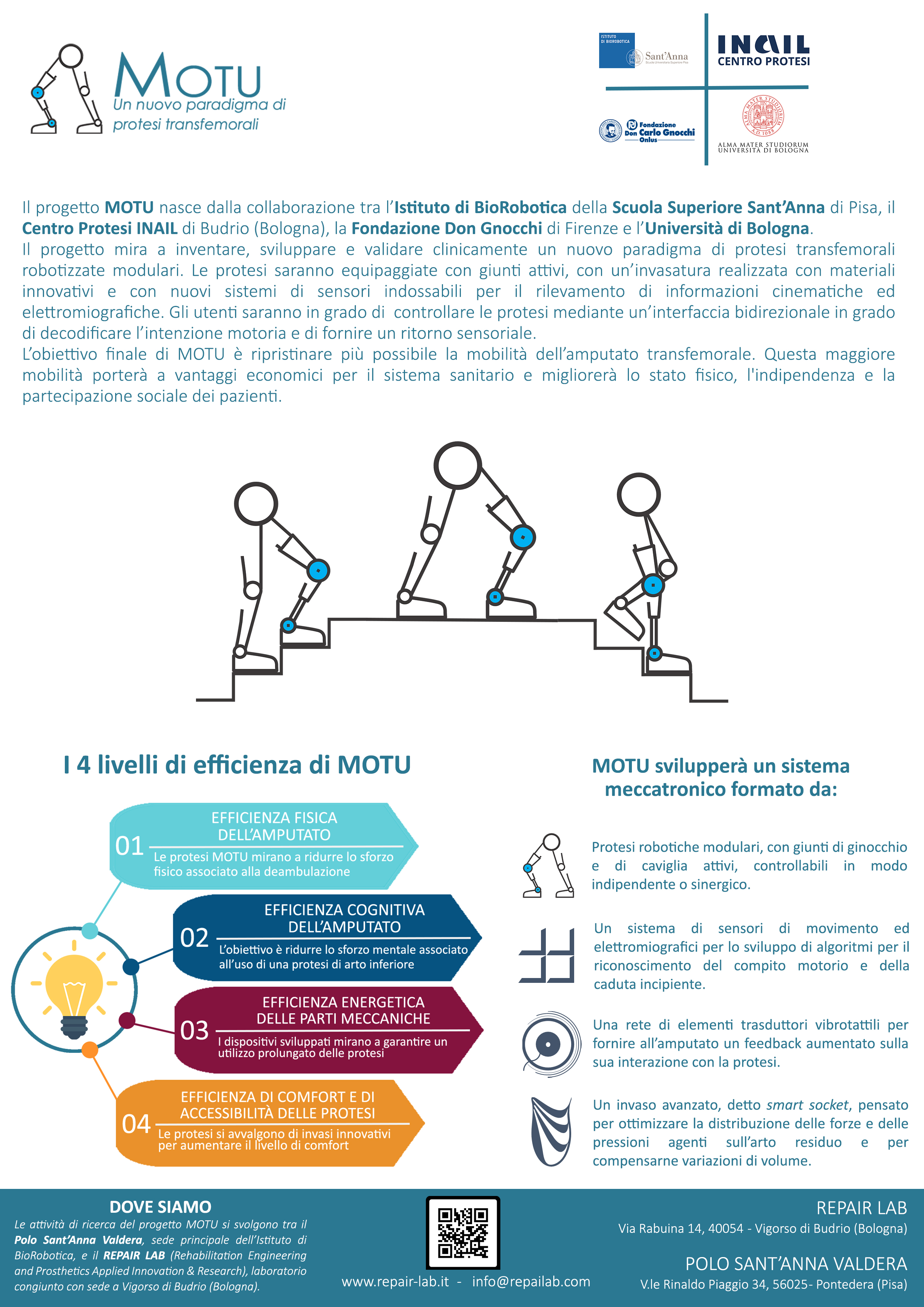
Il progetto MOTU nasce dalla collaborazione tra l’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa, il Centro Protesi INAIL di Budrio (Bologna), la Fondazione Don Gnocchi di Firenze e il Dipartimento di Ingegneria dell’Energia Elettrica e dell’Informazione “Guglielmo Marconi” dell’Università di Bologna. Il progetto mira a inventare, sviluppare e validare clinicamente un nuovo paradigma di protesi transfemorali robotizzate modulari. Le protesi saranno equipaggiate con giunti attivi, con un’invasatura realizzata con materiali innovativi e con nuovi sistemi di sensori indossabili per il rilevamento di informazioni cinematiche ed elettromiografiche. Gli utenti saranno in grado di controllare le protesi mediante un’interfaccia bidirezionale in grado di decodificare l’intenzione motoria e di fornire un ritorno sensoriale.
L’intero sistema sarà sviluppato per garantire quattro differenti livelli di efficienza: l’efficienza fisica e l’efficienza cognitiva dell’amputato (lo sforzo fisico e mentale che tipicamente è legato al cammino in pazienti con amputazione dell’arto inferiore), l’efficienza di comfort e di accettabilità della protesi, e l’efficienza energetica delle parti meccaniche, per garantire un utilizzo prolungato del dispositivo.
L’obiettivo finale di MOTU è ripristinare più possibile la mobilità dell’amputato transfemorale. Questa maggiore mobilità porterà a vantaggi economici per il sistema sanitario e migliorerà lo stato fisico, l’indipendenza e la partecipazione sociale dei pazienti.
Il progetto MOTU ha un forte sinergia con le attività di ricerca svolte nell’ambito del progetto europeo H2020 CYBERLEGs Plus Plus.
Scarica il flyer del progetto e il nuovo logo.
RESPONSABILI SCIENTIFICI:
Prof. Nicola Vitiello
Ing. Angelo Davalli
Dot.ssa Simona Castellano
PUBBLICAZIONI:
JOURNAL PAPERS:
- Papapicco V., et al. "A classification approach based on directed acyclic graph to predict locomotion activities with one inertial sensor on the thigh." IEEE Transactions on Medical Robotics and Bionics 3.2 (2021): 436-445.
- Aprigliano Federica, Silvestro Micera and Vito Monaco. "Pre-Impact Detection Algorithm to Identify Tripping Events Using Wearable Sensors." Sensors 19.17 (2019): 3713.
- Guaitolini Michelangelo, et al. "Ambulatory assessment of the dynamic margin of stability using an inertial sensor network." Sensors 19.19 (2019): 4117.
- Cesini Ilaria, et al. "Assessment of intuitiveness and comfort of wearable haptic feedback strategies for assisting level and stair walking." Electronics 9.10 (2020): 1676.
- Cesini I., et al. "Perception of time-discrete haptic feedback on the waist is invariant with gait events." IEEE Transactions on Neural Systems and Rehabilitation Engineering 28.7 (2020): 1595-1604.
- Martini Elena, et al. "Increased Symmetry of Lower-Limb Amputees Walking With Concurrent Bilateral Vibrotactile Feedback." IEEE Transactions on Neural Systems and Rehabilitation Engineering 29 (2020): 74-84.
- Cesini Ilaria, et al. "Seedless Hydrothermal Growth of ZnO Nanorods as a Promising Route for Flexible Tactile Sensors." Nanomaterials 10.5 (2020): 977.
- Fraleoni‐Morgera Alessandro, et al. "Hydrothermally Grown ZnO Nanorods as Promising Materials for Low Cost Electronic Skin." ChemNanoMat 6.1 (2020): 15-31.
- Gunasekaran Harish, et al. "Convergence of regular spiking and intrinsically bursting Izhikevich neuron models as a function of discretization time with Euler method." Neurocomputing 350 (2019): 237-247.
- D’Abbraccio Jessica, et al. "Haptic glove and platform with gestural control for neuromorphic tactile sensory feedback in medical telepresence." Sensors 19.3 (2019): 641.
- Sorgini Francesca, et al. "Neuromorphic vibrotactile stimulation of fingertips for encoding object stiffness in telepresence sensory substitution and augmentation applications." Sensors 18.1 (2018): 261.
- Paternò Linda, et al. "Sockets for limb prostheses: a review of existing technologies and open challenges." IEEE Transactions on Biomedical Engineering 65.9 (2018): 1996-2010.
- Ibrahimi Michele, et al. "A layer jamming actuator for tunable stiffness and shape-changing devices." Soft Robotics 8.1 (2021): 85-96.
- Paternò Linda, et al. "Residual limb volume fluctuations in transfemoral amputees." Scientific reports 11.1 (2021): 1-11.
- M. Guaitolini, F. Aprigliano, A. Mannini, A. M. Sabatini, V. Monaco, “Effects of Gait Speed on the Margin of Stability in Healthy Young Adults,” in Converging Clinical and Engineering Research on Neurorehabilitation III, 2019, pp. 420–424.
- F. Barberi, F. Aprigliano, E. Gruppioni, A. Davalli, R. Sacchetti, A. Mazzoni, S. Micera, “Fast Online Decoding of Motor Tasks with Single sEMG Electrode in Lower Limb Amputees,” in Wearable Robotics: Challenges and Trends, 2019, pp. 110–114.
- I. Cesini, G. Spigler, S. Prasanna, D. Taxis, F. Dell’Agnello, E. Martini, S. Crea, N. Vitiello, A. Mazzoni, C. M. Oddo, “A Wearable Haptic Feedback System for Assisting Lower-Limb Amputees in Multiple Locomotion Tasks.” International Symposium on Wearable Robotics. Springer, Cham, 2018.
- M. Filosa, I. Cesini, E. Martini, G. Spigler, N. Vitiello, C. M. Oddo, S. Crea, “A New Sensory Feedback System for Lower-Limb Amputees: Assessment of Discrete Vibrotactile Stimuli Perception During Walking.” International Symposium on Wearable Robotics. Springer, Cham, 2018.
- L. Paternò, M. Ibrahimi, E. Rosini, A. Menciassi, L. Ricotti, “Transfemoral Residual Limb Volume Change Due to Physical Activity”, In: L. Masia, S. Micera, M. Akay, J. Pons (eds) Converging Clinical and Engineering Research on Neurorehabilitation III. ICNR 2018. Biosystems & Biorobotics, vol 21.
- L. Paternò, M. Ibrahimi, E. Gruppioni, A. Menciassi, L. Ricotti, “Sockets for limb prostheses: a review of existing technologies and open challenges”, IEEE Transactions on Biomedical Engineering, IEEE Transactions on Biomedical Engineering, vol. 65, no. 9, pp. 1996-2010, Sept. 2018.
- L. Paternò, M. Ibrahimi, E. Rosini, A. Menciassi, L. Ricotti, “Residual Limb Volume Fluctuations in Transfemoral Amputees”, 6th Italian Bioengineering Group Congress – GNB, 2018 June 25-27, Milan, Italy.
- V. Papapicco, A. Parri, E. Martini, V. Bevilacqua, S. Crea, N. Vitiello, “Locomotion Mode Classification Based on Support Vector Machines and Hip Joint Angles: A Feasibility Study for Applications in Wearable”, Robotics –Springer Proceedings in Advanced Robotics, June 2018.
- F. Sorgini, L. Massari, J. D'Abbraccio, E. Palermo, A. Menciassi, P. B. Petrovic, A. Mazzoni, M. C. Carrozza, F. N. Newell, C. M. Oddo, "Neuromorphic Vibrotactile Stimulation of Fingertips for Encoding Object Stiffness in Telepresence Sensory Substitution and Augmentation Applications", Sensor, Volume 18, Issue 1, January 2018.
- M. Ibrahimi, L. Paternò, L. Ricotti, A. Menciassi, “Design of a socket with variable stiffness for lower limb prosthesis”, 29th Conference of the international Society for Medical Innovation and Technology, 9 – 10 November 2017, Torino, Italy.
CONFERENCE PAPERS:
- Barberi, Federica, et al. "Fast Online Decoding of Motor Tasks with Single sEMG Electrode in Lower Limb Amputees." International Symposium on Wearable Robotics. Springer, Cham, 2018.
- M. Ibrahimi, L. Paternò, L. Ricotti and A. Menciassi. “Design of a socket with variable stiffness for lower limb prosthesis.” 29th International Conference of the Society for Medical Innovation and Technology - SMIT, 2017 November 9-10, Turin (Italy)
- Paternò, Linda, et al. "Transfemoral Residual Limb Volume Change Due to Physical Activity." International Conference on NeuroRehabilitation. Springer, Cham, 2018.
- M. Ibrahimi, L. Paternò, L. Ricotti and A. Menciassi. “Layer jamming pneumatic actuator for medical robotics.” The Hamlyn Symposium on Medical Robotics, 2019 June 23-26, London (United Kingdom).
- M. Ibrahimi, L. Paternò, L. Ricotti and A. Menciassi. “Variable Stiffness/Shape Band to enhance Fitting and Comfort in Wearable Devices.” 17th World Congress of the International Society for Prosthetics and Orthotics - ISPO, 2019 October 5- 8, Kobe (Japan).
- L. Paternò, M. Ibrahimi, L. Ricotti and A. Menciassi. “Variable stiffness and shape interface to improve comfort in orthoses and prostheses.” 1st International Conference on Orthotics and Prosthetics – ICOP 2019 – 2019 November 20-21, Kuala Lumpur (Malaysia).
- L. Paternò, C. Quaglia, M. Ibrahimi, L. Ricotti and A. Menciassi. “A new smart prosthetic socket and transfemoral residual limb simulator.” 7th Italian Bioengineering Group Congress - GNB 2020, 2021 June 9-11, Trieste (Italy).
- P. Palumbo et al., “Falls and prostheses in patients with transfemoral amputation.” 7th Italian Bioengineering Group Congress – GNB 2020, 2021.
- P. Palumbo, S. Stravato, A. Davalli, F. Chesani, L. Chiari. “FRAME: Fall Risk Assessment for Lower Limb Amputees.” 41st EMB Conference. Berlin, July 23rd-27th, 2019
- L. Chiari et al. “Falls and locomotor capabilities in lower limb amputees. First results of a retrospective study from the MOTU project.” ISPGR World Congress. Edinburgh, June 30 – July 4, 2019.
- P. Palumbo, S. Moscato, L. Palmerini, N. Vitiello, A. Davalli, E. Gruppioni, P. Randi, L. Chiari. “Towards a personalized prosthetic prescription for transfemoral amputees: the strategy of the MOTU project.” 20° Congresso della SIAMOC. Bologna, October 9th-12th, 2019
- P. Palumbo, P. Randi, A. Davalli, L. Palmerini, L. Chiari. “Precision medicine for lower limb amputees.” 21th MOBEX meeting. Lausanne, January 19th-20th, 2018.
- P. Palumbo, P. Randi, A. Davalli, L. Palmerini, L. Chiari. “Falls in lower limb amputees. Design of a retrospective study from the MOTU project.” 19th International Conference on Falls and Postural Stability. Leeds, September 14th, 2018
- J. D’Abbraccio, S. Prasanna, I. Cesini, F. Dell’Agnello, S. Crea, N. Vitiello, A. Mazzoni, C. M. Oddo. “A Neuromorphic Haptic Feedback for Lower Limb Sensory Substitution”. 2021. GNB
- Cesini, Ilaria, et al. "A wearable haptic feedback system for assisting lower-limb amputees in multiple locomotion tasks." International Symposium on Wearable Robotics. Springer, Cham, 2018.
- Filosa, Mariangela, et al. "A new sensory feedback system for lower-limb amputees: Assessment of discrete vibrotactile stimuli perception during walking." International Symposium on Wearable Robotics. Springer, Cham, 2018.
- Massari, Luca, et al. "Neuromorphic haptic glove and platform with gestural control for tactile sensory feedback in medical telepresence applications." 2018 IEEE International Symposium on Medical Measurements and Applications (MeMeA). IEEE, 2018.
- I. Cesini, P. Kumar, A. Fraleoni Morgera, C.M. Oddo. “ZnO nanorod array-based tactile transducers for biomedical applications”. 2018. GNB
- Guaitolini, M., et al. "Effects of Gait Speed on the Margin of Stability in Healthy Young Adults." International Conference on NeuroRehabilitation. Springer, Cham, 2018. .
- Aprigliano, Federica, et al. "Pre-impact detection algorithm to identify lack of balance due to tripping-like perturbations." 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2019.
- Mezzina, Giovanni, et al. "Cortical reactive balance responses to unexpected slippages while walking: a pilot study." 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). IEEE, 2019.
- Mezzina, Giovanni, et al. "EEG/EMG based Architecture for the Early Detection of Slip-induced Lack of Balance." 2019 IEEE 8th International Workshop on Advances in Sensors and Interfaces (IWASI). IEEE, 2019.
- Finazzi A., Macrì Panarese A., Gallina P., Micera S., Monaco V., “Balance control after tripping: Margin of Stability and Limb Support Quotient”, GNB 2020