Collaborative robotics, a study published in Science Robotics has identified the more appropriate time for a robot to communicate its intentions to the human partner: "This system may have a decisive impact in a work scenario to reduce human fatigue"
To achieve a seamless human-robot collaboration it is crucial that robots express their intentions without perturbating or interrupting the task that the human partner is performing at that moment. A study coordinated by The BioRobotics Institute of the Scuola Superiore Sant'Anna, in collaboration with the University of Ferrara, has identified the most appropriate time for a robot to communicate the request for passage of an object without disturbing human action. This study, published in Science Robotics, aims to improve human-robot interaction, especially during a collaborative task in the industrial field and beyond, with obvious benefits on the quality of collaborative activities, on the naturalness of movements and on the safety of the work process.
"The recent use of collaborative robots in the industrial field – explains Marco Controzzi, Assistant Professor at the BioRobotics Institute and coordinator of the study – has led us to address the ergonomics of robot behavior".
"These aspects, in addition to the adoption of new perception technologies and artificial intelligence algorithms, will allow to robots to really help during the execution of heavy and repetitive tasks" adds Gastone Ciuti, professor of Bioengineering at The BioRobotics Institute.
THE CRUCIAL MOMENT
The study has identified that the more appropriate time for a robot to communicate its intention is shortly after the operator picked up an object. Communicating its request with timing, the robot will facilitate the collaborative task and will avoid interfering with the ongoing human action.
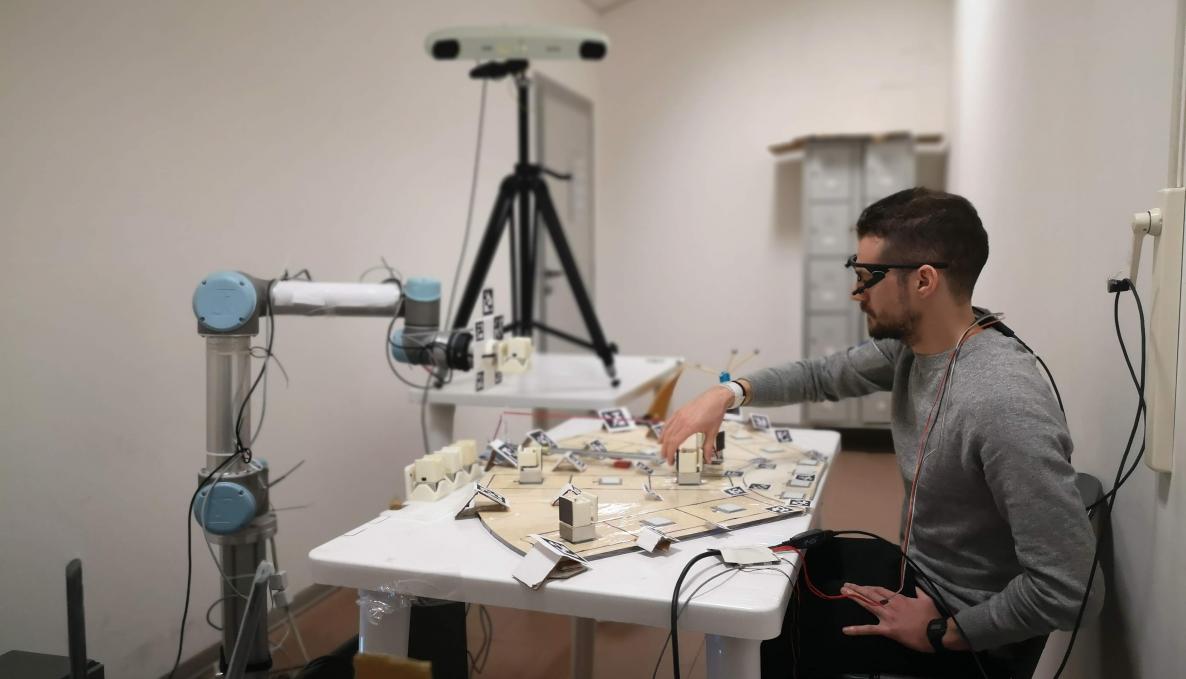
How does the communication between the person and the robot take place? “We have developed a system that is based on a small wearable haptic interface – says Controzzi - This wearable interface will send a signal when the robot requires the passage of an object”. The robot is equipped with a vision system to monitor the operator’s movement: when the human is in the optimal task phase to receive a request of collaboration, the robot will send a signal to the wearable interface that releases a short vibration.
"One of the central themes of our study is the way the robot communicates its intentions during the interaction – comment Francesca Cini and Tommaso Banfi, post docs of The BioRobotics Institute and first authors of the research - This system may have a decisive impact to improve the fluency and performances of the human-robot collaboration confirming the importance of robots in a work scenario to reduce human fatigue and cognitive stress”.
"This study is an example of a multidisciplinary approach to the development of collaborative robotics - says Laila Craighero, Professor at the University of Ferrara - it is necessary that robotics integrates the knowledge of cognitive neuroscience on the role of sensorimotor and cognitive processes during the interaction of the individual with objects and with others. The results of this field of investigation are fundamental so that the collaborative robot does not perform a simple gesture but a "gesture adapted" to the environmental, social and emotional context".


