MYHAND - Myoelectric-Hand prosthesis with Afferent Non-invasive feedback Delivery

MY-HAND è il nome di un progetto di ricerca finanziato dal Ministero dell’Istruzione, Università e Ricerca tra marzo 2012 e settembre 2015 all’interno del Fondo per gli Investimenti della Ricerca di Base (FIRB 2010), programma di finanziamento che incentiva la ricerca tra la nuova generazione di ricercatori.
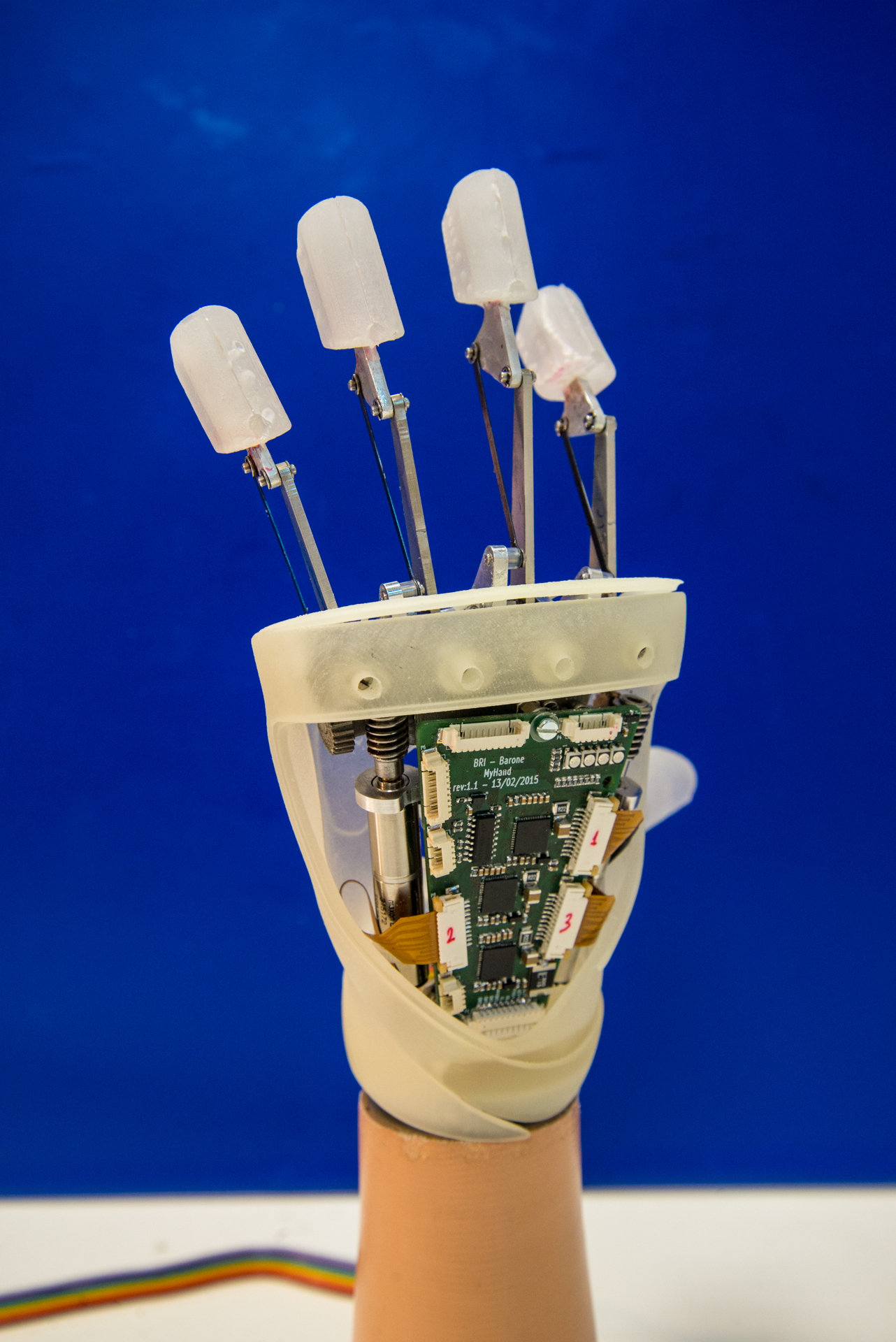
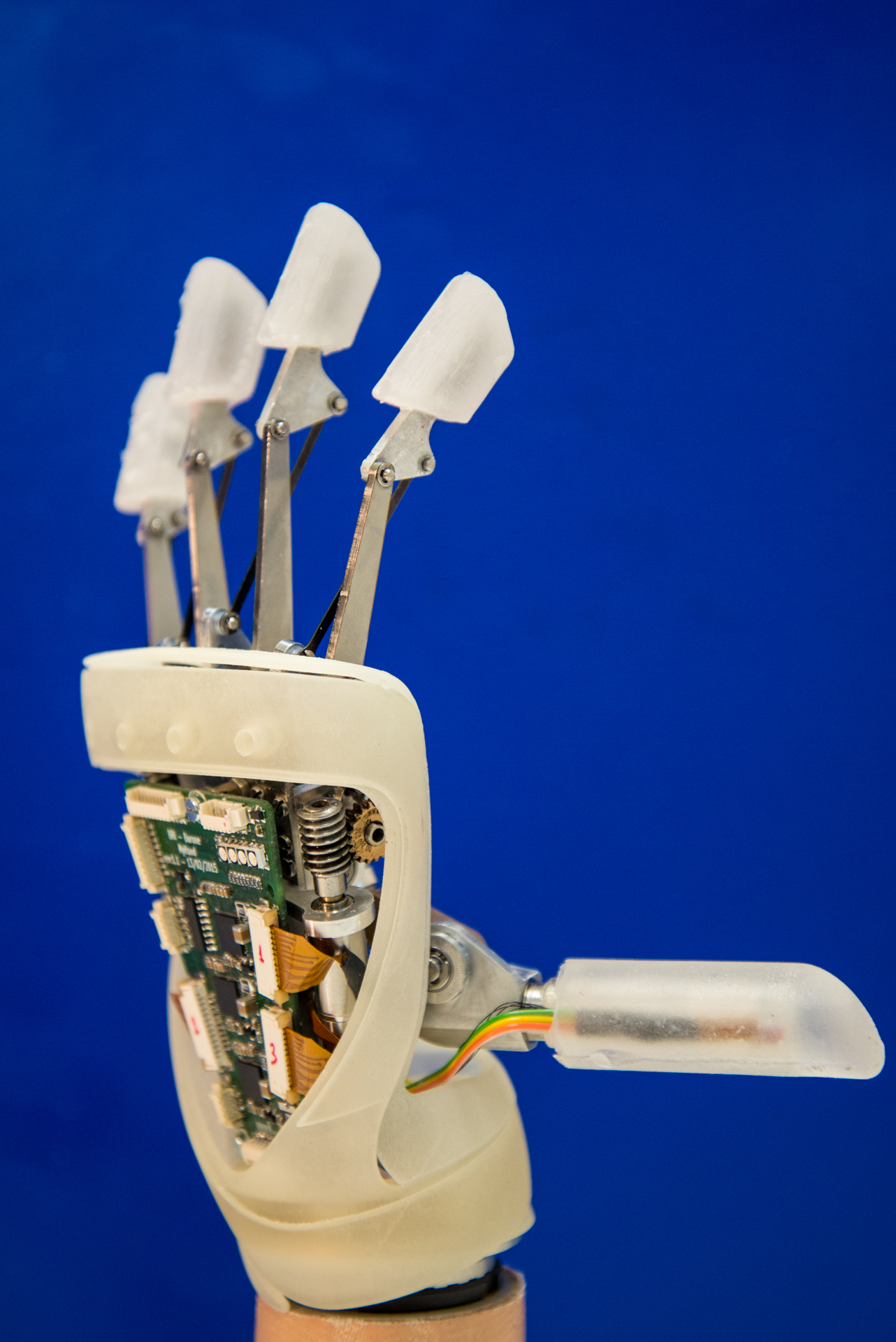
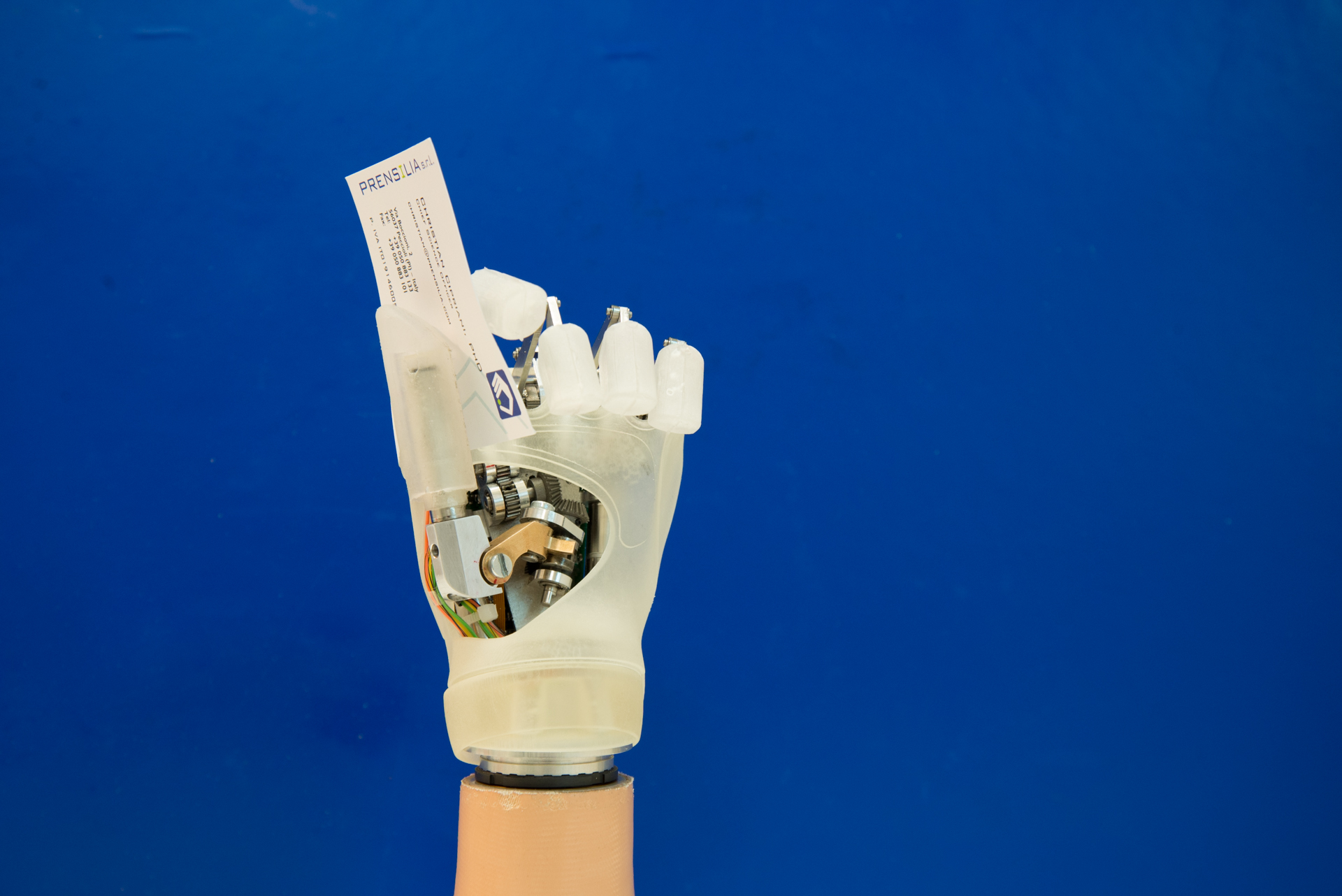
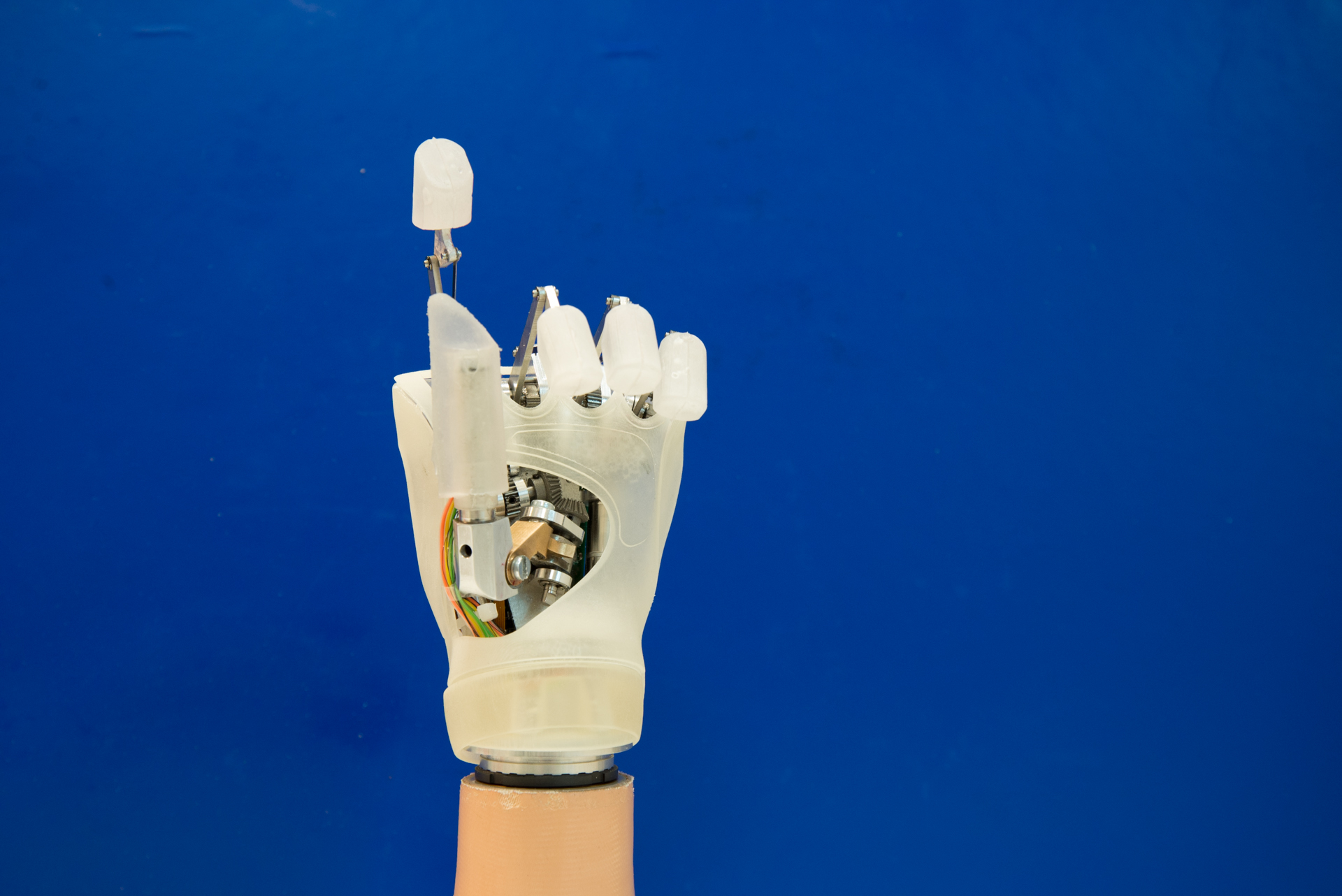
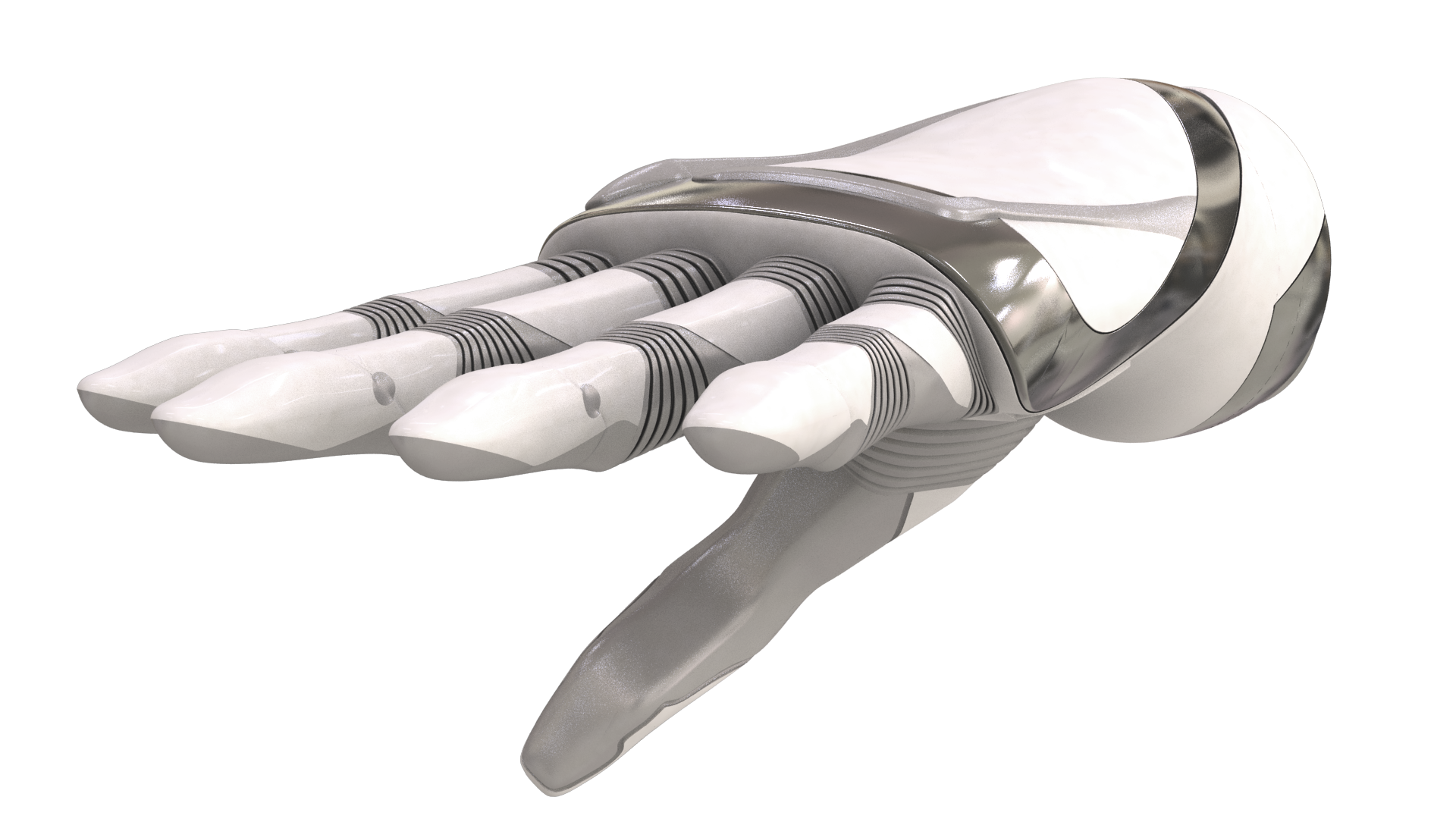
L’obiettivo di MY-HAND è stato quello di sviluppare una protesi robotica con feedback sensoriale in grado di ripristinare le funzionalità di una mano naturale utilizzando tecnologie non invasive. Nel corso del progetto, il team dell’Artificial Hands Area, coordinato da Christian Cipriani, ha sviluppato un’innovativa e robusta mano caratterizzata da meccanismi miniaturizzati, da leggerezza e da capacità funzionali. La mano robotica MY-HAND è capace di riprodurre le tre prese fondamentali di una mano naturale: la presa di precisione, la presa di potenza, la presa laterale. I movimenti e le prese della mano vengono controllati in maniera naturale attraverso sensori capaci di rilevare i segnali nervosi che attraversano i muscoli. Le intenzioni della persona diventano così i movimenti della protesi.
Il prototipo MY-HAND è attualmente sviluppato da Prensilia, all'interno della sovvenzione europea DeTOP. MY-HAND ha inoltre supportato le attività di ricerca riguardanti il controllo mioelettrico non invasivo e il feedback sensoriale, come testimoniano le pubblicazioni riportate qui sotto.
ENTE FINANZIATORE: MIUR (FIRB 2010)
NUMERO DEL PROGETTO: RBFR10VCLD
PERIODO E DURATA DEL PROGETTO: 2012-2015 (42 MESI)
FINANZIAMENTO A ARTIFICIAL HANDS AREA: 320 K€
FINANZIAMENTO COMPLESSIVO: 320 K€
Pubblicazioni scientifiche
Articoli su rivista
- M. Controzzi, F. Clemente, D. Barone, A. Ghionzoli, C. Cipriani, “The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 25, no. 5, pp. 459-468, 2017 (on line version 2016);
- F. Clemente, M. D’Alonzo, M. Controzzi, B. Edin, C. Cipriani, “Non-invasive, temporally discrete feedback of object contact and release improves grasp control of closed-loop myoelectric transradial prostheses,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 34, no. 12, pp. 1314-1421, 2016 (on line version 2015);
- F. Montagnani, M. Controzzi, C. Cipriani, “Is it Finger or Wrist Dexterity That is Missing in Current Hand Prostheses?” IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no.4, pp. 600-609, 2015;
- F. Montagnani, M. Controzzi, C. Cipriani, “Non-Back-Drivable Rotary Mechanism with Intrinsic Compliance for Robotic Thumb Abduction/Adduction,” Advanced Robotics, vol. 29, no. 8, pp. 561-571, 2015;
- S. Crea, C. Cipriani, M. Donati, M. C. Carrozza, N. Vitiello, “Providing time-discrete gait information by wearable feedback apparatus for lower-limb amputees: usability and functional validation,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no. 2, pp.250-257, 2015;
- J.L. Segil, M. Controzzi, R.F. Weir, C. Cipriani, "Comparative study of State of the Art Myoelectric Controllers for Advanced Prosthetic Hands using Virtual and Physical Assessment," Journal of Rehabilitation Research & Development, vol. 51, no.9, pp. 1439-1454, 2014;
- M. D'Alonzo, F. Clemente, C. Cipriani, "Vibrotactile stimulation promotes embodiment of an alien hand in amputees with phantom sensations," IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no. 3, pp. 450-457, 2015. (Online version 2014); Articolo in primo piano
- C. Cipriani, J. Segil, F. Clemente, R. Weir, B. Edin, "Humans can integrate feedback of discrete events in their sensorimotor control of a robotic hand," Experimental Brain Research, vol. 232, no. 11, pp. 3421-3429, 2014;
- M. Controzzi, M. D'Alonzo, C. Peccia, C. M. Oddo, M. C. Carrozza, C. Cipriani, "Bioinspired fingertip for anthropomorphic robotic hands," Applied Bionics and Biomechanics, vol. 11, no. 1-2, pp. 25-38, 2014;
- M. Markovic, S. Dosen, C. Cipriani, D. Popovic, D. Farina, “Stereovision and augmented reality for closed loop control of grasping in hand prostheses”, Journal of Neural Engineering, vol. 11, no. 046001, 2014;
- C. Cipriani, J. Segil, A. Birdwell, R. Weir, “Dexterous control of a prosthetic hand using fine-wire intramuscular electrodes in targeted extrinsic muscles,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 22, no. 4, pp. 828-836, 2014; Video - Scarica l'articolo. Articolo in primo piano
- M. D’Alonzo, S. Dosen, C. Cipriani, D. Farina, “HyVE – Hybrid Vibro-Electrotactile Stimulation – is an Efficient Approach to Multi-Channel Sensory Feedback”, IEEE Transactions on Haptics, vol. 7, no. 2, pp. 181-190, 2014; (On line version 2013) Scarica l'articolo
- T. Pistohl, C. Cipriani, A. Jackson, K. Nazarpour, “Abstract and Proportional Myoelectric Control for Multi-Fingered Hand Prostheses”, Annals of Biomedical Engineering, vol. 41, no. 12, pp. 2687-2689, 2013;
- M. D'Alonzo, S. Došen, C. Cipriani, D. Farina, "HyVE: Hybrid Vibro-Electrotactile Stimulation for Sensory Feedback and Substitution in Rehabilitation," IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 22, no. 2, pp. 290-301, 2014 (online version 2013). Scarica l'articolo
- C. Antfolk, M. D’Alonzo, M. Controzzi, G. Lundborg, B. Rosén, F. Sebelius, C. Cipriani, "Artificial redirection of sensation from prosthetic fingers to the phantom hand map on transradial amputees: vibrotactile vs mechanotactile sensory feedback discrimination," IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 21, no. 1, pp. 112-120, 2013 (online version 2012);
- C. Antfolk, M. D’Alonzo, B. Rosén, G. Lundborg, F. Sebelius, C. Cipriani, "Sensory feedback in upper limb prosthetics," Expert Review of Medical Devices, vol. 10, no.1, pp. 45-54, 2013. Scarica l'articolo
- M. D’Alonzo and C. Cipriani, “Vibrotactile sensory substitution elicits feeling of ownership of an alien hand,” PLOS ONE, vol. 7, no. 11, pp. 1-9, 2012;
- M. Controzzi, F. Clemente, S. Dragoni, C. Cipriani, “A dexterous hand prosthesis based on a Gevena drive: preliminary design,” In Proc. of the Myoelectric Control/Powered Prosthetics Symposium, Fredericton, NB, Canada, Aug. 18-22, 2014.
Articoli presentati a conferenze
- F. Montagnani, M. Controzzi, C. Cipriani, “Exploiting arm posture synergies in activities of daily living to control the wrist rotation in upper limb prostheses: a feasibility study,” In Proc. of Intl. Conf. of the Engineering in Medicine and Biology Society, EMBC, Milan, Italy, August 25-29, 2015;
- H. Alangari, G. Kanitz, S. Tarantino, J. Rigosa, C. Cipriani, “Feature and Channel Selection using Correlation Based Method for Hand Posture Classification in Multiple Arm Positions,” International Conf. on NeuroRehabilitation, ICNR, Aalborg, Denmark, Jun. 24-26, 2014;
- F. Clemente and C. Cipriani, “A novel device for multi-modal sensory feedback in hand prosthetics: design and preliminary prototype,” In Proc. of IEEE Haptics Symposium, Houston, TX, Feb. 23-26, 2014;
- F. Montagnani, M. Controzzi, C. Cipriani, “Preliminary Design and Development of a two Degrees of Freedom passive compliant prosthetic wrist with switchable stiffness,” In Proc. of IEEE Intl. Conf. Robotics and Biomimetics (ROBIO), Shenzhen, China, Dec. 12 – 14, 2013;
- T. Pistohl, C. Cipriani, A. Jackson, K. Nazarpour, “Adapting Proportional Myoelectric-Controlled Interfaces for Prosthetic Hands,” In Proc. of Intl. Conf. of the Engineering in Medicine and Biology Society, EMBC, pp. 6195-6198, Osaka, Japan, July 3 – 7, 2013;
- F. Montagnani, M. Controzzi, C. Cipriani, “A comparison between different configurations of hand/wrist prostheses,” In Proc. of the Myoelectric Control/Powered Prosthetics Symposium, Fredericton, NB, Canada, Aug. 18-22, 2014.