13 brevetti della Scuola Sant’Anna selezionati per TechShare Days – Italian Tech Week: dal pancreas artificiale al filtro polarizzatore per migliorare la qualità delle immagini ottiche, le invenzioni in mostra a Torino
13 brevetti della Scuola Superiore Sant’Anna sono stati selezionati per essere esposti al TechShare Days, all’interno della Italian Tech Week, la settimana della tecnologia organizzata dal Politecnico di Torino e dall’Università di Torino. L’evento espositivo e di incontro con gli stakeholder, aziende e investitori, si è svolto a Torino martedì 25 giugno. In questa occasione l’U.O. Valorizzazione Ricerca della Scuola Superiore Sant’Anna ha incontrato potenziali acquirenti e licenziatari, interessati ad acquisire e sviluppare le tecnologie nate presso gli Istituti.
Sono stati presentati il pancreas artificiale, organo artificiale per l'erogazione di una quantità adeguata di insulina in risposta a parametri selezionabili, registrati da un sensore di glicemia. Il dispositivo è ricaricabile con capsule ingeribili contenenti insulina. Il brevetto di titolarità della Scuola Superiore Sant’Anna è stato esteso in Francia, Germania, UK, USA e in Italia, e ne sono inventori Leonardo Ricotti, Tareq Assaf, Cesare Stefanini e Arianna Menciassi. Presenta la tecnologia Virginia Simoni.
L’arto robotico bioispirato è una struttura senza giunzioni o parti rigide, in grado di allungarsi, accorciarsi, flettersi, irrigidirsi, tirare, comprimersi, stringere, manipolare e lavorare in spazi ristretti. Le varie sezioni del braccio sono gestibili indipendentemente, ma in virtù della continuità, sono soggette a una forza distribuita. Il braccio è utilizzabile in aree sottomarine, disastrate, interfacce uomo-macchina e in chirurgia.
Insieme è stato presentato anche un robot biomimetico, pensato per replicare la struttura e le funzioni svolte da un Polpo Octopus Vulgaris. Proprio come un polpo, il robot, attraverso i suoi tentacoli, è in grado di svolgere compiti diversi in contemporanea. quindi può essere pensato per l’integrazione in automazione industriale per lo svolgimento di task dove sia necessaria un contatto gentile con il prodotto da gestire.
L’attuatore pneumatico Bi-Direzionale, muscolo artificiale in grado di produrre forza e movimento bi-direzionale a rigidità variabile, è un altro brevetto presentato. Gli attuatori pneumatici esistenti sono caratterizzati da un angolo fisso tra le fibre che li rende in grado di produrre una forza di trazione unidirezionale quando attuati, quindi soltanto di contrarsi o espandersi. Questo muscolo artificiale è in grado di contrarsi, di espandersi e di irrigidirsi semplicemente variando l’angolo tra le fibre. Il brevetto può trovare applicazione nel settore degli esoscheletri, sia ai fini riabilitativi che di aiuto ai compiti industriali, ma anche nella manipolazione e locomozione, nel controllo automatico delle valvole nella movimentazione di carichi e nella gestione differenziale di task industriali. Il brevetto di titolarità congiunta tra Scuola Superiore Sant’Anna e Fondazione Istituto Italiano Tecnologia (IIT) è stato esteso in Europa, in USA, in Cina, in Giappone e in Italia, e ne sono inventori Matteo Cianchetti, Cecilia Laschi, Paolo Dario, Taimoor Hassan Shah Syed e Mazzolai Barbara.
E’ stato presentato anche un robot subacqueo per il monitoraggio, esplorazione o interazione con il fondale marino o strutture sommerse, saltellando sul fondale, e muovendosi su terreni accidentati altrimenti difficili da esplorare accuratamente con mezzi tradizionali La struttura della singola gamba consente di mantenere immobile il robot risparmiando energia ed aumentando l’accuratezza.
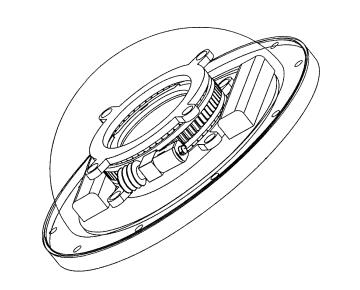
Riflettori anche sul filtro polarizzatore per il miglioramento di immagini ottiche. Il filtro polarizzatore è in grado di ruotare autonomamente all’interno della macchina fotografica e permette di acquisire una sequenze di frame a polarizzazione differente (10°) e di inviarle al sistema di processing. In questo modo si ottengono immagini che non presentano il problema dell’attenuazione e della diffusione della luce nell’acqua. Il brevetto esteso in PCT è di titolarità della Scuola Superiore Sant’Anna ed emerge ancora dall’Istituto di Biorobotica ad opera degli inventori Marcello Calisti, Gaetano Carbonara e Cecilia Laschi.
Desc-Glove è un dispositivo di interfaccia aptica che consente ai pazienti amputati o con deficit sensoriali di percepire un segnale a livello della parte deficiente, di un braccio o di una gamba e di convertirlo in uno stimolo elettrico a sua volta riconvertito in tattile e quindi trasferirlo ad una parte ricevente.
Il giunto meccanico a modalità di trasmissione selezionabile è una soluzione pensata per le interfacce uomo-macchina, dove è importante progettare giunti con una certa cedevolezza meccanica, questo consente di ridurre la severità delle sollecitazioni sulla trasmissione e conferisce maggiore sicurezza all’interfaccia. L’invenzione consente di variare la modalità di trasmissione adattandosi a carichi anche molto differenti fra loro, simulando in maniera realistica il giunto anatomico. Ai seguenti link l’attività di ricerca del gruppo che ha sviluppato queste invenzioni: 1, 2.
Una piattaforma per l’identificazione, la classificazione e la successiva rimozione di difetti di fabbricazione presenti sui componenti di veicoli. Il sistema consente di individuare e correggere i difetti, prima e dopo la verniciatura, permettendo una ricostruzione più accurata della geometria tridimensionale del difetto e un intervento di correzione più mirato ed efficace. Ancora una piattaforma per la verifica della capacità frenante di un veicolo. Un sistema di bilanciamento stabilizza la scocca sulla piattaforma, mentre un interfaccia aziona l’impianto frenante, infine un sensore rileva la forza tangenziale tra ruota e rullo rotante. La piattaforma comprende un sistema di localizzazione e movimentazione per identificare veicolo, manubrio e freno e un sistema d’interfaccia con l’unità di controllo che gestisce il restante processo di verifica della capacità frenante.
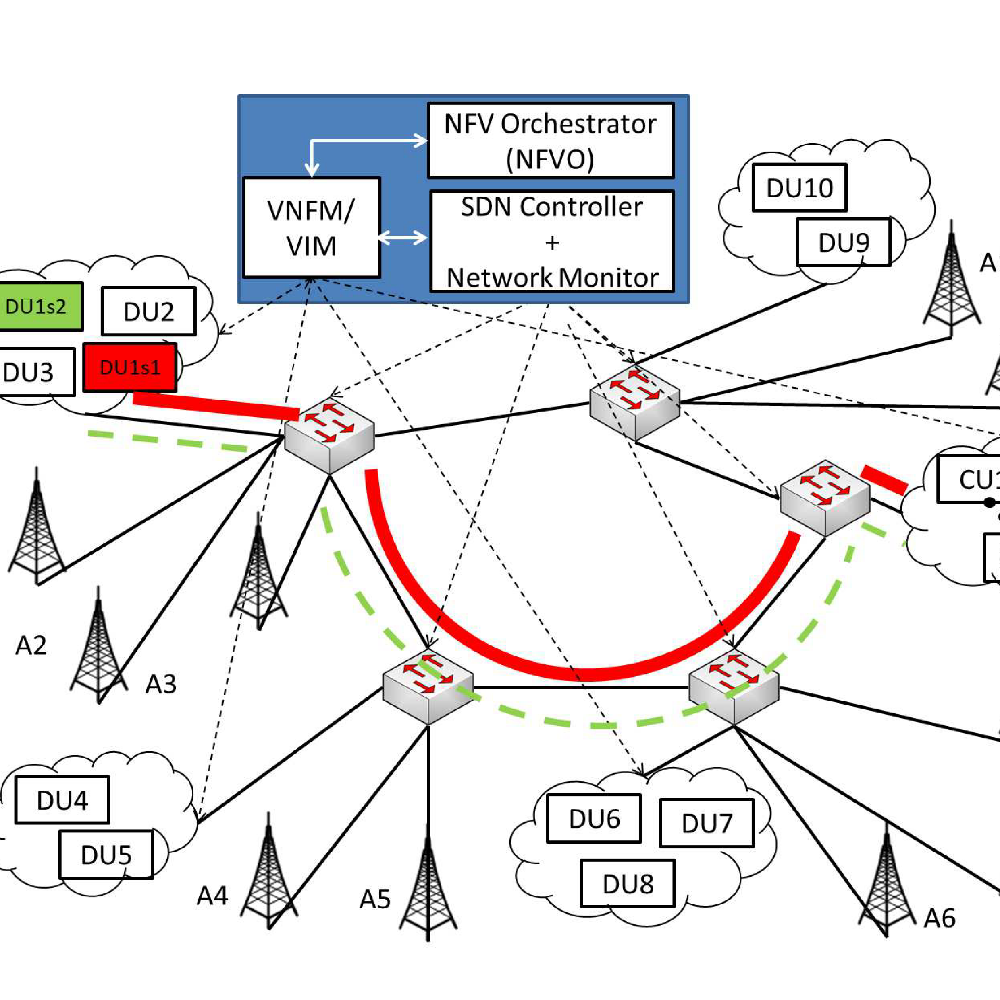
Instruction-based system for fast recovery è un sistema che consente di istruire i dispositivi di rete sulle azioni (ad esempio, re-routing o adattamento dei parametri di trasmissione) da eseguire in seguito a errori o degradazioni della qualità del segnale, senza interrogare un controller centralizzato. In questo modo, il recupero dei servizi è garantito in modo molto più veloce.
Il sistema per la gestione di una rete 5G: nelle reti di telecomunicazioni i guasti sono eventi frequenti e producono una degradazione del segnale trasmesso. L’invenzione consente il ripristino della connessione della rete 5G, tramite la riduzione della velocità di trasmissione al di sotto della velocità necessaria al servizio stesso, o la modulazione della quantità di dato trasferito. L'invenzione proposta può essere applicata ad una vasta gamma di scenari di rete: reti 5G, reti metropolitane, cloud computing, virtualizzazione delle funzioni di rete (NFV).
Il sistema di interconnessione ottica è una soluzione che consente il packaging di segnali ottici, riducendo lo spazio necessario per la commutazione del segnale ottico (Optical Space Switching Il packaging consente un minore consumo energetico e maggiore velocità di trasmissione produttività Il sistema crea pacchetti di segnale combinando modalità multiple di propagazione, lunghezze d'onda e altre grandezze fisiche di una trasmissione ottica, in modo da impacchettare e smistare in maniera differenziale le informazioni.