Wearable Robotics Laboratory
Nei prossimi anni i paesi industrializzati sono chiamati ad affrontare il problema dell’invecchiamento della popolazione e, di conseguenza, il miglioramento delle condizioni di vita degli anziani. Si stima infatti che, nei prossimi quarant'anni, circa il 35% della popolazione europea sarà over 60: questo dato mette in luce l’urgenza di trovare soluzioni che mettano gli anziani in condizione di rimanere attivi, creativi, produttivi e indipendenti.
Le patologie legate al cammino e alla funzionalità degli arti superiori sono tra le più comuni e devastanti nella popolazione degli anziani, poiché portano a una riduzione drastica del tenore di vita e a un aumento della mortalità.
In questo scenario, la missione del Wearable Robotics Laboratory è quella di inventare, realizzare e validare robot indossabili innovativi (detti anche esoscheletri o ortesi attive), per assistere, riabilitare o accrescere specifici movimenti.
I nostri robot
Ortesi attiva di bacino (APO)
L’APO è un’ortesi attiva portabile per la riabilitazione e l’assistenza di persone con disabilità motorie. L’APO è costituito da due blocchi di attuazione e due link che si collegano con la coscia della persona e che trasferiscono una coppia dal motore del dispositivo alla gamba della persona. Ciascun blocco di attuazione utilizza un Series Elastic Actuator (questa soluzione meccanica è molto utilizzata nell’ambito della robotica indossabile) per assistere il movimento di flesso/estensione dell’anca. Un encoder assoluto inoltre è inserito in ciascun giunto per la misura dell’angolo di anca in tempo reale. Grazie a due gradi di libertà passivi sui piani frontale e orizzontale, la persona che indossa l’APO può liberamente eseguire l’adduzione/abduzione dell’anca e la intra/extra rotazione.
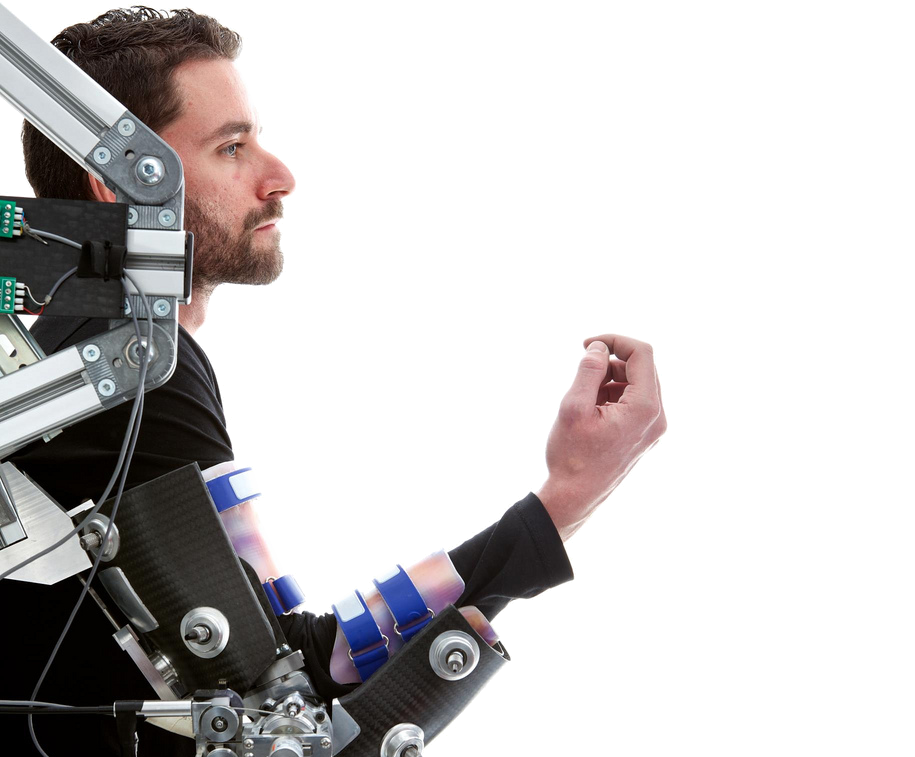
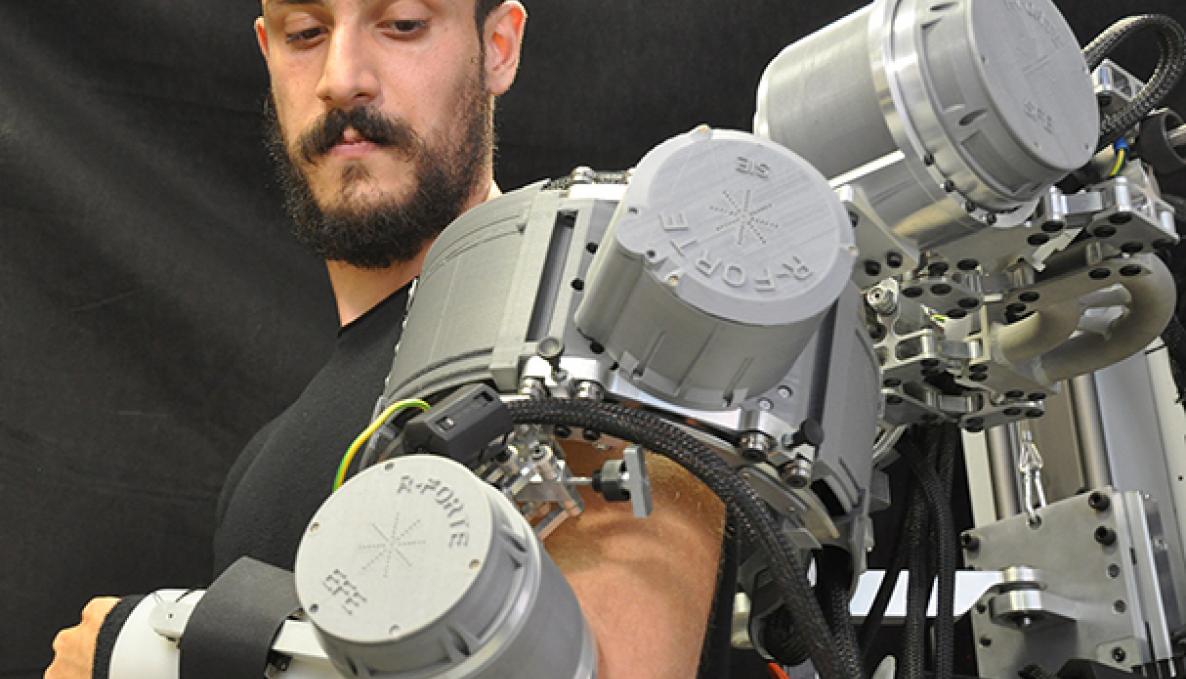
NEUROExos, esoscheletro per la riabilitazione del gomito e della spalla
NEUROExos è un esoscheletro per la riabilitazione del braccio in pazienti colpiti da ictus. NEUROExos risponde a diversi requisiti di alto livello: indossabile, range di movimento, gradi di libertà passivi per permettere il movimento, controllabilità in posizione e coppia. Inoltre il robot implementa diverse funzionalità, come la possibilità di eseguire teleriabilitazione, un sistema di ritorno aptico e un’interfaccia grafica, atte ad aumentare i risultati della riabilitazione.
Ciascun grado di libertà attivo contiene un molla torsionale per realizzare un Series Elastic Actuator: tre gradi di libertà attivi con assi mutuamente perpendicolari si intersecano nel centro della spalla, permettendo di assistere i movimenti di flesso/estensione, addo/abduzione e intra/extra rotazione della spalla; il quarto grado di libertà attivo è localizzato sul gomito e ne permette la flesso/estensione.
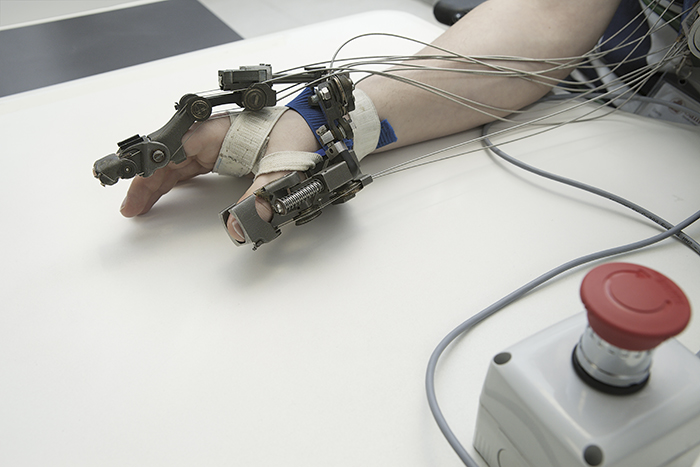
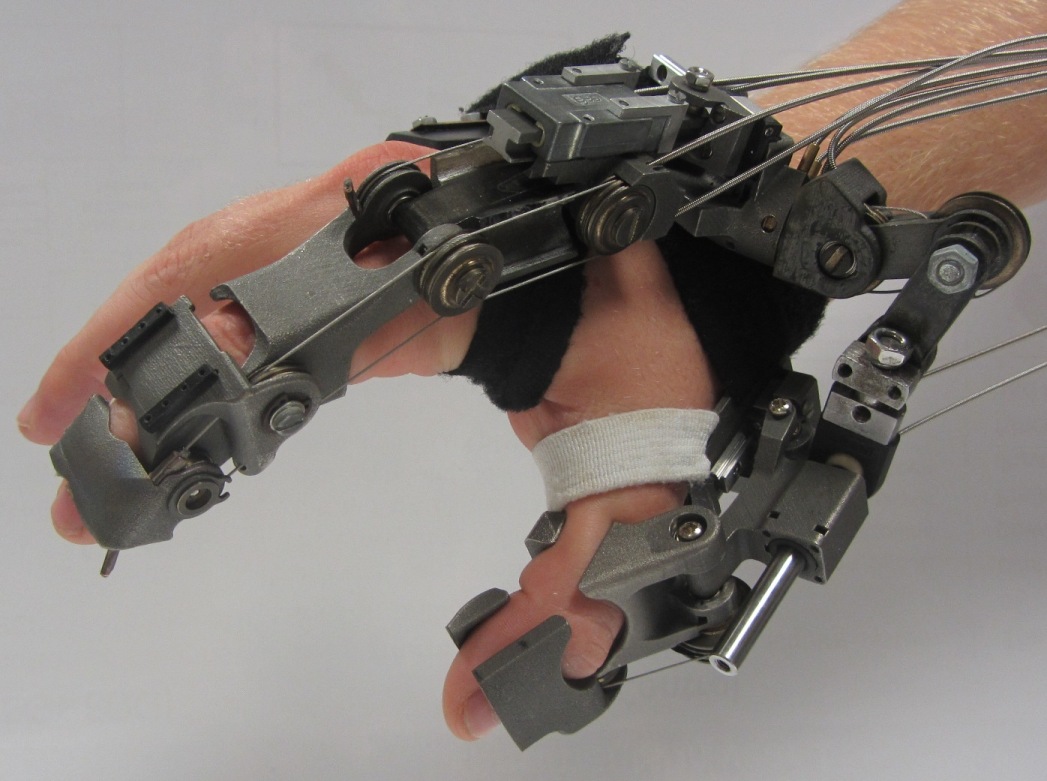
HANDExos, un esoscheletro per la riabilitazione della mano
HANDExos è un esoscheletro per la riabilitazione della mano, in persone affette da paresi, dovuta a ictus o altre patologie neurologiche. HANDExos è costituito da due moduli indipendenti per la mobilizzazione di due dita, il pollice e l’indice. I gusci dell’esoscheletro sono caratterizzati da ingombro limitato, sia sulla parte laterale delle dita, sia sulle parte dorsale sia sul palmo della mano. Questo design permette di avere masse ridotte, bassa inerzia ed è facilmente indossabile. Inoltre questa configurazione dell’esoscheletro permette alla persona di eseguire diversi tipi di presa, dalla presa di precisione alla presa laterale.
L’esoscheletro è costituito da 4 gradi di libertà attivi che permettono la mobilitazione di tutti i giunti delle due dita. Tutti i gradi di libertà sono attuati in modo bidirezionale: due cavi, in grado di tirare in direzioni opposte, permettono i movimenti di flesso estensione dei giunti.
Responsabili scientifici
Prof. Nicola Vitiello
e-mail: nicola.vitiello@santannapisa.it
Tel.: 050-883472
Dr. Simona Crea
e-mail: simona.crea@santannapisa.it
Tel.: 050-883163
Dr. Emilio Trigili
e-mail: emilio.trigili@santannapisa.it