CECA 2020 - Inail
CECA 2020 (Protesi funzionale di arto superiore con mano multi-articolata sensorizzata a controllo biomimetico non invasivo) mira a sviluppare e sperimentare una nuova generazione di protesi di arto superiore ad alto contenuto tecnologico, in grado di ripristinare le funzionalità motorie e sensoriali dell’arto perduto. Il progetto interviene su due scenari clinici principali: i casi di amputazione parziale e i casi di amputazione completa di mano (livello transradiale).
Per i casi di amputazione parziale, CECA 2020 rappresenta la naturale evoluzione del progetto di ricerca PPR3, anch’esso finanziato da INAIL, e punta alla sperimentazione di protesi cosmetiche passive con feedback sensoriale, protesi motorizzate con sensoristica tattile e di sistemi per il controllo e il feedback sensoriale non invasivo.
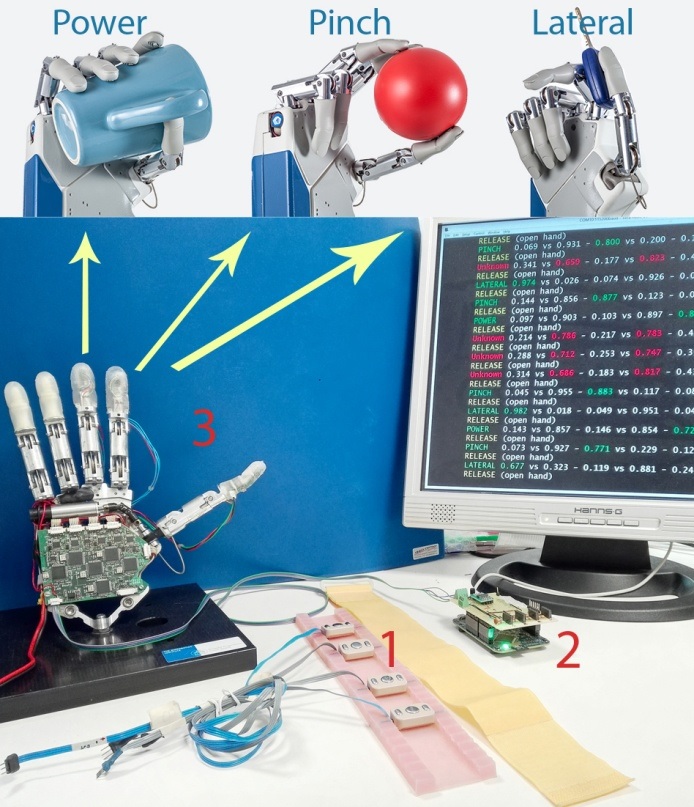
Per i casi amputazione completa, CECA 2020 supporta la missione dell’Artificial Hands Area dell’Istituto di BioRobotica di sviluppare e validare protesi di mano multi articolate e sensorizzate. In questo senso il progetto CECA 2020, pur mantenendo obiettivi specifici legati alla realizzazione di componentistica hardware (trasmissioni innovative, sensori e sistemi per il controllo e ritorno sensoriale), si inserisce in un contesto di ricerca più ampio e in sinergia rispetto ai progetti ERC e H2020 in corso: MYKI (bidirectional MYoKInetic implanted interface for natural control of artificial limbs), incentrato sullo sviluppo di innovative interfacce di controllo protesico, e DeTOP (Dexterous Transradial Osseointegrated Prosthesis with neural control and sensory feedback), che studia soluzioni di protesi attraverso la tecnica dell’osseointegrazione.
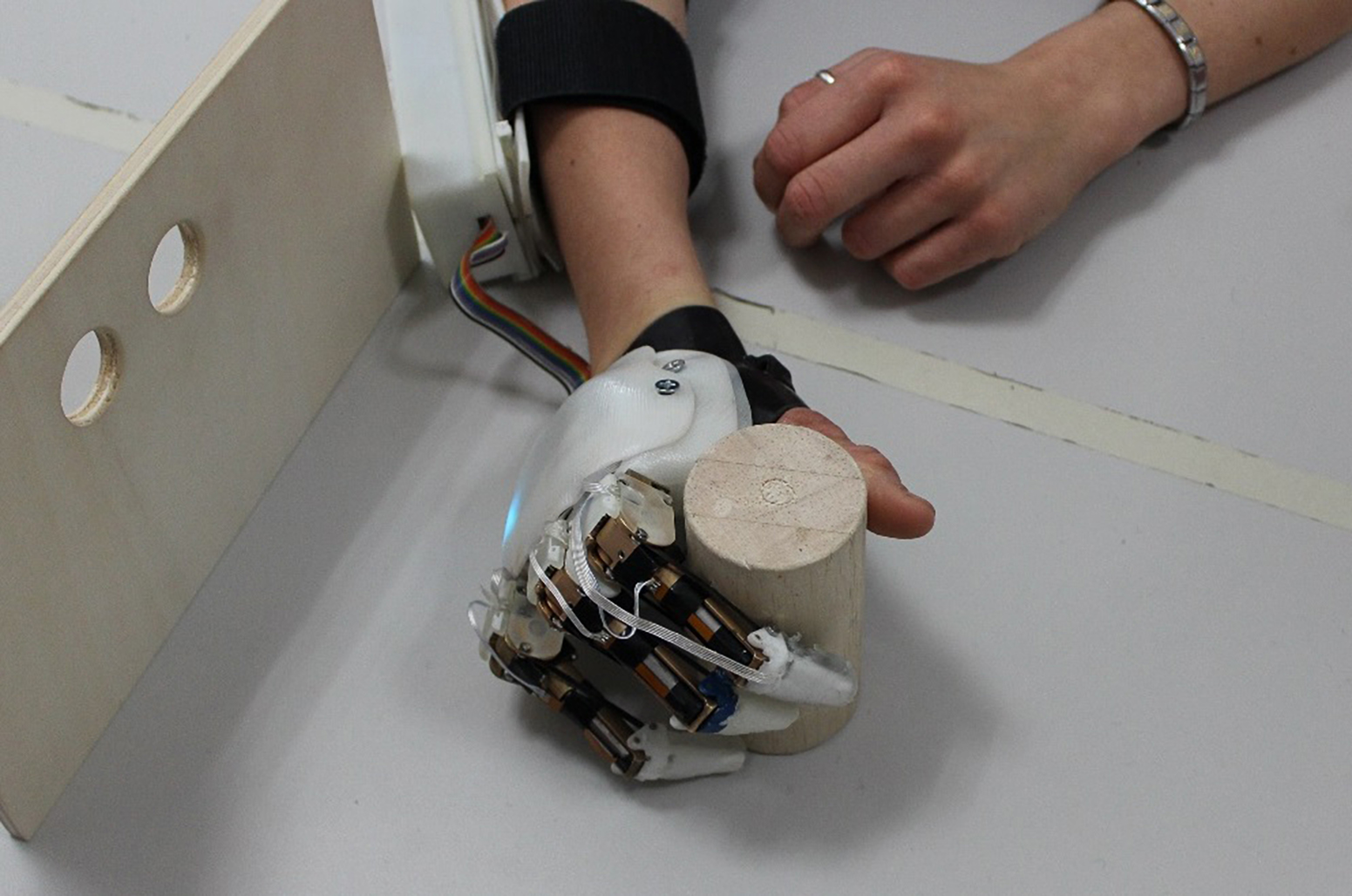
Grazie a un approccio interdisciplinare che unisce la ricerca d’avanguardia nei settori dell’ingegneria biomedica, della robotica, e delle neuroscienze applicate, CECA 2020 promuove una nuova frontiera di dispositivi che, seppur in fase prototipale, promettono di riprodurre la naturalezza dei movimenti della mano umana.
Visita il sito del progetto.
Ente finanziatore: INAIL
Nome del progetto: CECA 2020
Periodo e durata: 2017-2020 (36 mesi)
Finanziamento a Artificial Hands Area: 0,9 M€
Finanziamento complessivo: 0,9 M€
RESPONSABILI SCIENTIFICI:
Prof. Christian Cipriani
Ing. Angelo Davalli
Dot.ssa Simona Castellano
PUBBLICAZIONI SCIENTIFICHE:
- T.H. Lenssen, L. Cappello, D. H. Plettenburg, C. Cipriani, M. Controzzi, Principal Orientations of the Wrist During ADLs: Towards the Design of a Synergetic Wrist Prosthesis, ICNR 2018 (International Conference on NeuroRehabilitation, Pisa, 16-20 Ottobre 2018);
- J. Brand, I. Imbinto, M. Bacchereti, C. Cipriani, M. Controzzi, Improvements on the design of the S-Finger prosthetic digit, ICNR 2018 (International Conference on NeuroRehabilitation, Pisa, 16-20 Ottobre 2018);
- I. Martinez, F. Clemente, G. Kanitz, A. Mannini, A. M. Sabatini, C. Cipriani, Grasp Force Estimation from HD-EMG Recordings with Channel Selection Using Elastic Nets: Preliminary Study, 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), (Enschede, 26-29 Agosto 2018);
- L. Engels, L. Cappello, C. Cipriani, Digital Extensions with Bi-axial Fingertip Sensors for Supplementary Tactile Feedback Studies, 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), (Enschede, 26-29 Agosto 2018);
- M. Aboseria, F. Clemente, L. Engels, C. Cipriani, Discrete Vibro-Tactile Feedback Prevents Object Slippage in Hand Prostheses More Intuitively Than Other Modalities, IEEE Transactions on Neural Systems and Rehabilitation Engineering (Volume 26, Issue 8 – Agosto 2018);
- G. Kanitz, F. Montagnani, M. Controzzi, C. Cipriani, Compliant prosthetic wrists entail more natural use than stiff wrists during reaching, not (necessarily) during manipulation, IEEE Transactions on Neural Systems and Rehabilitation Engineering (Volume 26, Issue 7 – Luglio 2018);
- I. Imbinto , F. Montagnani, M. Bacchereti, C. Cipriani, A. Davalli, R. Sacchetti, E. Gruppioni, S. Castellano, M. Controzzi, The S-Finger: a synergetic externally powered digit with tactile sensing and feedback, IEEE Transactions on Neural System and Rehabilitation Engineering (Volume 26, Issue 6 – Giugno 2018);
- M. Controzzi, L.Bassi Luciani, F. Montagnani, Unified Approach to Bi-Directional Non-Back Drivable Roller Clutch Design, Mechanism and Machine Theory, (IF 2.577, Volume 116, pp. 433-450, 2017;
- M. Controzzi, F. Clemente, N. Pierotti, M. Bacchereti, C. Cipriani, Evaluation of the hand function transporting fragile objects: the Virtual Eggs Test, 2017 MEC Symposium, Fredericton, New Brunswick, 15-18 Agosto 2017;
- D. Barone, M. D'Alonzo, M. Controzzi, F. Clemente, C. Cipriani, A Cosmetic Prosthetic Digit with Bioinspired Embedded Touch Feedback, 2017 IEEE-RAS EMBS International Conference on Rehabilitation Robotics ICORR, London, UK, July 17-20, 2017. 3rd place at the RehabWeek 2017 Best Poster Competition (>500 posters participating).