Artificial Hands Area
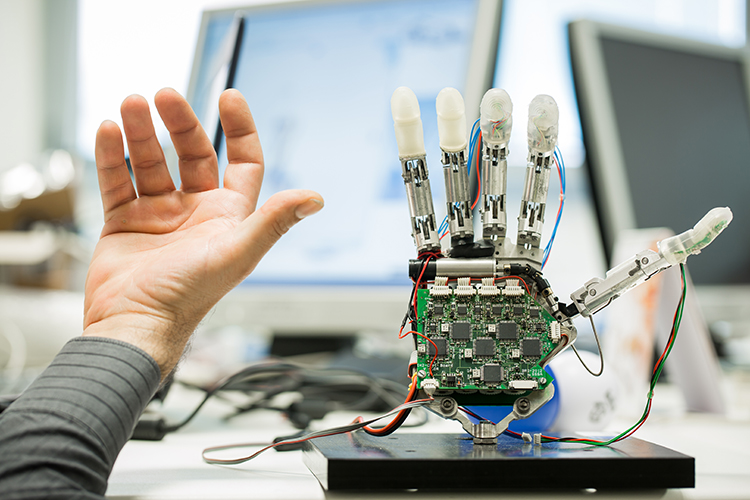
L’Artificial Hands Area dell’Istituto di BioRobotica conduce attività di ricerca nei settori della meccatronica e delle interfacce uomo-macchina con l’obiettivo di sviluppare mani e braccia robotiche da impiegare come protesi controllate dal pensiero. L'area di ricerca è coinvolta in progetti nazionali e internazionali nel settore della robotica cognitiva, dell’interazione uomo-robot, delle protesi neuro-controllate.
I principali filoni di ricerca includono: protesi di arto superiore; mani robotiche ad elevata destrezza e sensoristica tattile robusta; dispositivi indossabili e algoritmi per il ritorno sensoriale; interfacce uomo-macchina non-invasive per il controllo naturale della presa e la percezione intuitiva del feedback sensoriale.
Dall'intensa attività di ricerca è nata nel 2009 la spin-off Prensilia, che sviluppa e commercializza in tutto il mondo mani robotiche per la ricerca e l’industria.
L'Artificial Hands Area include al suo interno lo Human Robot Interaction Laboratory (HRI), coordinato dal Dr. Marco Controzzi, il Textile Robotics Lab, coordinato dal Dr. Leonardo Cappello, ed è coinvolta nelle attività del REPAIR Lab (Rehabilitation Engineering and Prosthetics Applied Innovation & Research), laboratorio congiunto con INAIL - Centro Protesi di Vigorso di Budrio (Bologna). Il laboratorio di HRI sviluppa robusti sensori tattili artificiali, prototipi di interazione uomo-robot, meccanismi per una sicura ed efficiente interazione tra uomo e robot. Il Textile Robotics Lab dell’Istituto di BioRobotica conduce attività di ricerca nei settori della tecnologia dei materiali, delle interfacce uomo-macchina e della robotica soft per lo sviluppo di sistemi robotici basati su materiali tessili funzionali. Il REPAIR LAb ha invece l'obiettivo di creare un collegamento tra le attività di ricerca e la riabilitazione clinica.
Per maggiori informazioni puoi scaricare la nostra brochure, puoi guardare il video dell'Area in fondo alla pagina e seguire il nostro canale YouTube.
Responsabile scientifico
Pubblicazioni Recenti
- V. Ortenzi, M. Controzzi, F. Cini, J. Leitner, M. Bianchi, M. A. Roa, P. Corke, Robotic manipulation and the role of the task in the metric of success, Nature Machine Intelligence, 2019;
- F. Cini, V. Ortenzi, P. Corke, M. Controzzi, On the choice of grasp type and location when handing over an object, Science Robotics, Vol. 4, Issue 27, 2019;
- I. Imbinto, F. Montagnani, M. Bacchereti, C. Cipriani, A. Davalli, R. Sacchetti, E. Gruppioni, S. Castellano, M. Controzzi, The S-Finger: a synergetic externally powered digit with tactile sensing and feedback, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018;
- S.Tarantino, F. Clemente, D. Barone, M. Controzzi, C. Cipriani, The myokinetic control interface: tracking implanted magnets as a means for prosthetic control, Scientific Reports 7, Article number: 17149 (2017); Vedi il video
- M. Controzzi, F. Clemente, D. Barone, A. Ghionzoli, C. Cipriani, The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis, IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2016;
- F. Clemente, M. D’Alonzo, M. Controzzi, B. Edin, C. Cipriani, Non-invasive, temporally discrete feedback of object contact and release improves grasp control of closed-loop myoelectric transradial prostheses, IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2015;
- F. Montagnani, M. Controzzi, C. Cipriani, Is it Finger or Wrist Dexterity That is Missing in Current Hand Prostheses?, IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no.4, pp. 600-609, 2015;
- M. D'Alonzo, F. Clemente, C. Cipriani, Vibrotactile stimulation promotes embodiment of an alien hand in amputees with phantom sensations, IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no. 3, pp. 450-457, 2015;
- C. Cipriani, J. Segil, A. Birdwell, R. Weir, Dexterous control of a prosthetic hand using fine-wire intramuscular electrodes in targeted extrinsic muscles, IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 22, no. 4, pp. 828-836, 2014; Vedi il video