Surgical Robotics and Allied Technologies Area

Studiare problemi, identificare tecnologie abilitanti e sviluppare soluzioni per un avanzamento non incrementale nel settore della chirurgia e della diagnostica mini-invasiva e per la terapia localizzata dalla macro alla meso e nano scala. Sono questi gli obiettivi che hanno segnato la nascita e la crescita dell’area di Surgical Robotics and Allied Technologies.
L’area mira a risolvere il divario tra diagnosi e terapia, unendo competenze scientifiche provenienti dai settori della Robotica e della Bioingegneria allo sviluppo di piattaforme abilitanti che hanno la capacità di trattare molte patologie nel corpo umano, anche in zone difficili da raggiungere (come ad esempio il sistema cardiovascolare, l’apparato respiratorio, il sistema nervoso centrale nella cavità addominale).
L'obiettivo è quello di sviluppare dispositivi intelligenti che permettano di eseguire le procedure mediche o chirurgiche in regime minimamente invasivo, e in modo sempre più affidabile, riproducibile e sicuro. Nelle stesso tempo, queste soluzioni mirano a un miglioramento della qualità della vita del paziente attraverso tecnologie e dispositivi sempre più avanzati. All'interno di quest'area di ricerca si collocano, infine, metodologie di sviluppo di strumenti per la diagnosi in vitro e in vivo, la medicina rigenerativa e l'ingegneria cellulare.
Le principali linee di ricerca sono:
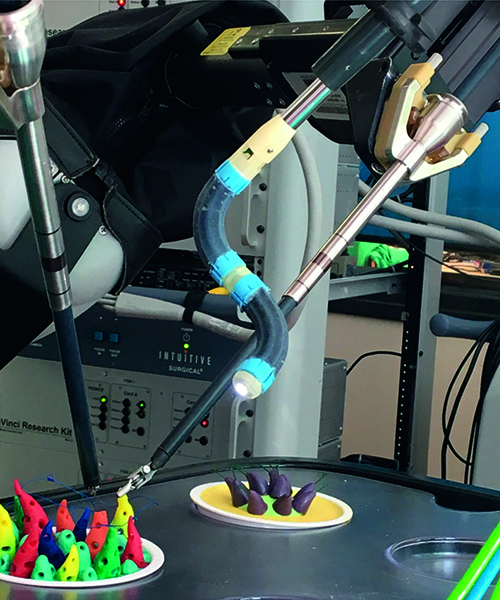
Dispositivi robotici avanzati per diagnosi e terapia mirata
Linea di ricerca che raccoglie tutti i progetti dedicati allo sviluppo di robot, capsule, cateteri e sonde in grado di operare e spostarsi all'interno del corpo umano per applicazioni diagnostiche e terapeutiche. Diagnosi e terapia possono essere eseguite nell'addome umano, nel sistema cardiovascolare, nel tratto gastrointestinale, ma anche in altri distretti difficili da raggiungere. Le dimensioni tipiche dei dispositivi varia da 10 cm a decine di micron, a seconda della zona di destinazione e del paziente (che può essere un adulto o un bambino).
Sistemi di rilevamento per i dispositivi medici
Linea di ricerca che sviluppa sistemi di telerilevamento per il monitoraggio sanitario o per l'assistenza sanitaria (ad esempio per le persone con dispositivi di assistenza ventricolare), e tecnologie di visualizzazione per i dispositivi endoluminali da utilizzare nelle varie cavità del corpo umano.
Tecnologie abilitanti (es. nanotrasduttori e sistemi bio-ibridi)
Linea di ricerca che comprende una vasta gamma di nuove soluzioni tecnologiche che punta a migliorare le possibilità e le prestazioni degli attuali sensori, attuatori e sistemi meccatronici. Tali soluzioni si basano sullo sviluppo e sull'assemblaggio di materiali intelligenti e di micro/nano-particelle, e sull'integrazione delle cellule viventi e dei tessuti all'interno di strutture bioartificiali, verso lo sviluppo di sistemi bio-ibridi.
Responsabile scientifico
Prof. Arianna Menciassi
e-mail: arianna.menciassi@santannapisa.it
Tel.: 050-883418
Eventi in programma
European Robotics Forum 2024 (ERF): Rimini, 15 marzo 2024
Paper selezionati
- V. Iacovacci, I. Tamadon, E. F. Kauffmann, S. Pane, V. Simoni, L. Marziale, M. Aragona, L. Cobuccio, M. Chiarugi, P. Dario, S. Del Prato, L. Ricotti, F. Vistoli, A. Menciassi, A fully implantable device for intraperitoneal drug delivery refilled by ingestible capsules, Science Robotics 6, eabh3328 (2021);
- L. Paternò, M. Ibrahimi, E. Rosini, G. Menfi, V. Monaco, E. Gruppioni, L. Ricotti, A. Menciassi, Residual limb volume fluctuations in transfemoral amputees, Scientific reports 11 (1), 1-11, 2021;
- S. Maglio, C. Park, S. Tognarelli, A. Menciassi, ET Roche, High fidelity physical organ simulators: from artificial to bio hybrid solutions, IEEE Transactions on Medical Robotics and Bionics, 2021/3/4;
- S. Pane, V. Iacovacci, E. Sinibaldi, A. Menciassi, Real-time imaging and tracking of microrobots in tissues using ultrasound phase analysis, Applied Physics Letters 118 (1), 014102;
- V. Iacovacci, I. Tamadon, M. Rocchi, P. Dario, A. Menciassi, Toward dosing precision and insulin stability in an artificial pancreas system, Journal of Medical Devices, Transactions of the ASME, 13(1),011008, 2019;
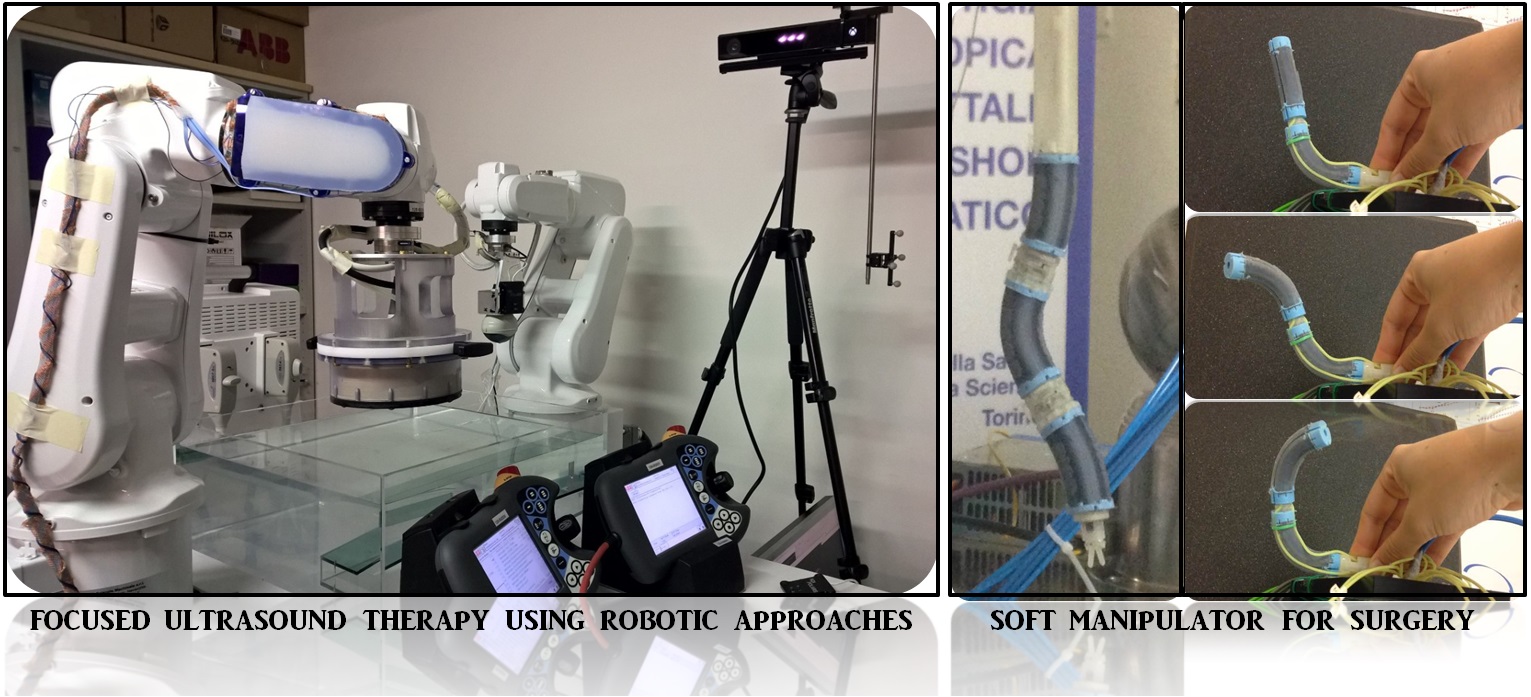
- L. Paternò, G. Tortora, A. Menciassi, Hybrid soft-rigid actuators for minimally invasive surgery, Soft Robotics, 5(6), pp. 783-799, 2018;
- L. Paternò, M. Ibrahimi, E. Gruppioni, A. Menciassi, L. Ricotti, Sockets for limb prostheses: A review of existing technologies and open challenges, IEEE Transactions on Biomedical Engineering, 65(9),8267041, pp. 1996-2010, 2018;
- V. Iacovacci, L. Ricotti, E. Sinibaldi, G. Signore, F. Vistoli, A. Menciassi, An Intravascular Magnetic Catheter Enables the Retrieval of Nanoagents from the Bloodstream, Advanced Science, 5(9),1800807, 2018;
- L. Marziale, G. Lucarini, T. Mazzocchi, L. Ricotti, A. Menciassi, Artificial Sphincters to Manage Urinary Incontinence: A Review, Artificial Organs, 42(9), pp. E215-E233, 2018;
- M. Cianchetti, C. Laschi, A. Menciassi, P. Dario, Biomedical applications of soft robotics, Nature Reviews Materials 3(6), pp. 143-153, 2018;
- G. Lucarini, V. Iacovacci, P.J. Gouveia, L. Ricotti, A. Menciassi, Design of a novel magnetic platform for cell manipulation, Journal of Micromechanics and Microengineering, 28(2),025009, 2018;
- A. Diodato, A. Cafarelli, A. Schiappacasse, S. Tognarelli, G. Ciuti, A. Menciassi, Motion compensation with skin contact control for high intensity focused ultrasound surgery in moving organs, Physics in Medicine and Biology, 63(3),035017, 2018;
- L. Ricotti, B. Trimmer, A. W. Feinberg, R. Raman, K. K. Parker, R. Bashir, M. Sitti, S. Martel, P. Dario, A. Menciassi, Biohybrid actuators for robotics: A review of devices actuated by living cells, Science Robotics, 2(12),eaaq0495, 2017;
- I. De Falco, M. Cianchetti, A. Menciassi, A soft multi-module manipulator with variable stiffness for minimally invasive surgery, Bioinspiration and Biomimetics, 12(5),056008, 2017;
- T. Mazzocchi, L. Ricotti, N. Pinzi, A. Menciassi, Magnetically Controlled Endourethral Artificial Urinary Sphincter, Annals of Biomedical Engineering, 45(5), pp. 1181-1193, 2017;
- A. Cafarelli, A. Verbeni, A. Poliziani, Tuning acoustic and mechanical properties of materials for ultrasound phantoms and smart substrates for cell cultures, Acta Biomaterialia, 49, pp. 368-378, 2017;
- I. Baldoli, S. Tognarelli, F. Vangi, D. Panizza, R. T. Scaramuzzo, A. Cuttano, C. Laschi, A. Menciassi, An active simulator for neonatal intubation: Design, development and assessment, Medical Engineering and Physics, 39, pp. 57-65, 2017;
- L. J. Slikler, G. Ciuti, M. E. Rentschler, A. Menciassi, Frictional resistance model for tissue-capsule endoscope sliding contact in the gastrointestinal tract, Tribology International,102, pp. 472-484, 2016.
Progetti attivi o recenti
Progetti internazionali
- REGO “Cognitive robotic tools for human-centered small-scale multi-robot operations”, international grant funded by the European Commission through the research and innovation programme Horizon Europe. REGO will develop magnetic multi-robot motion control systems, autonomous swarm control techniques for micro-sized robots, human-robot haptic-centered interfaces, and cognitive shared-control techniques.
- MAPWORMS “Mimicking Adaptation and Plasticity in WORMS”, international grant funded by the European Commission through the research and innovation programme Horizon Europe. MAPWORMS will develop a new generation of bioinspired, soft, small-scale robots able to respond to external stimuli and to adapt to the working environment.
- ARTERY "Autonomous Robotics for Transcatheter dEliveRy sYstems", progetto di ricerca finanziato dalla Commissione Europea nell’ambito del programma HORIZON 2020;
- DIH-HERO "Digital Innovation Hub in Healthcare Robotics", progetto finanziato dalla Commissione Europea per nuove soluzioni robotiche nel campo della sanità;
- ATLAS "AuTonomous intraLuminAl Surgery" - progetto Marie Curie per la formazione di esperti ricercatori nel settore della robotica chirurgica.
Progetti nazionali
- BRIEF - Biorobotics Research and Innovation Engineering Facilities - Project funded under the National Recovery and Resilience Plan (NRRP), Mission 4 Component 2 Investment 3.1 – Fund for the implementation of an integrated system of research and innovation infrastructures – of Italian Ministry of University and Research funded by the European Union – NextGenerationEU; Project identification code IR0000036, Concession Decree No. 3262 of 28/12/2021 adopted by the Italian Ministry of University and Research, CUP J13C22000400007, “Biorobotics Research and Innovation Engineering Facilities” (BRIEF).
- INAIL - MOTU - sviluppo e valutazione di una nuova protesi di arto inferiore con una interfaccia di controllo bidirezionale;
- INAIL - RELIEF - progettazione, realizzazione e validazione di uno sfintere uretrale artificiale per aumentare l’autonomia del paziente dal catetere e da altri dispositivi esterni.
- INAIL - BIOSUP - soluzioni innovative e modulari per il ripristino delle funzionalità dell’apparato urinario
Vecchi progetti
- FUTURA "Focused Ultrasound Therapy Using Robotic Approaches", FP7-ICT-611963-2013.3.2 Cognitive System and Robotics;
- ENDOVESPA "Endoscopic Versatile robotic guidance, diagnosis and therapy of magnetic-driven soft-tethered endoluminAl robots", FP7-ICT 24- 688592 - 2015 Robotics - item c. Innovation Actions: Technology transfer;
- S3InNeo "Simulazione e strumentazione per intubazione neonatale;
- ROBOIMPLANT: dispositivo robotico impiantabile per rilascio controllato di farmaci a livello intraperitoneale.
- M2NEURAL, FP7-M-ERA.NET;
- VALVETECH "Realizzazione di una valvola artoica polimerica di nuova concezione e impiantabile tramite piattaforma robotica con tecniche di chirurgia mininvasiva". Leggi l'intervista a Giorgio Soldani, coordinatore del progetto e responsabile del Laboratorio di Biomateriali dell’Istituto di Fisiologia Clinica del CNR;
- IMEROS "Integrated medical robotic solutions", Nuove tecnologie robotiche integrate per la diagnosi teleassistita intraoperatoria e per il trattamento chirurgico dei tumori. Leggi l'intervista con il dott. Michele Di Marino, chirurgo presso l'Azienda Ospedaliera Universitaria Careggi;
- CAPSULIGHT: Realizzazione di una capsula robotica a LED per il trattamento dei disordini gastrointestinali;
- STIFF-FLOP
- SUAVES
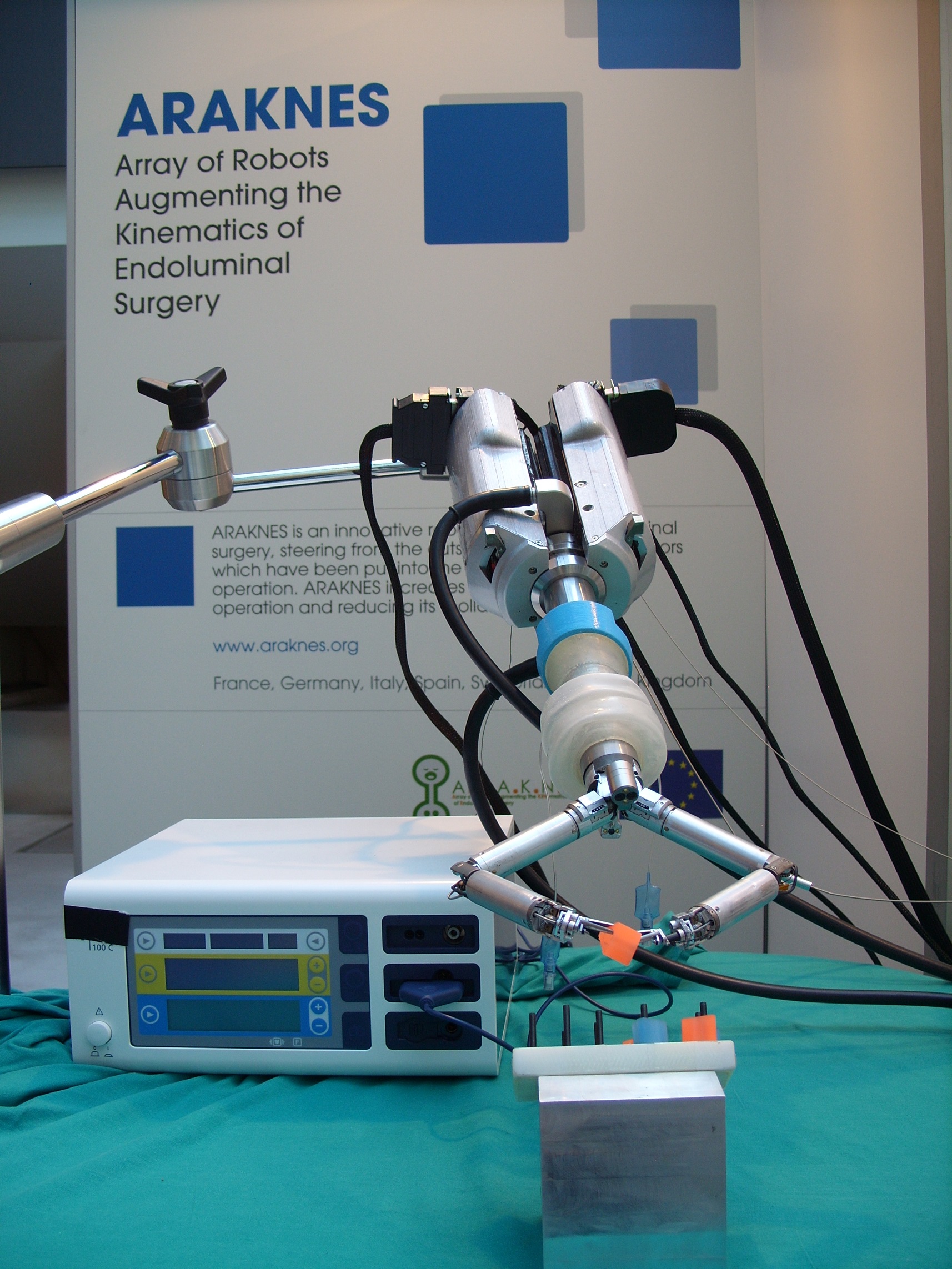
- ARAKNES
- VECTOR
- MILORDS
- MICROVAST
- SUPCAM
- MERESSINA
- SCATH
- NAOMI