TELE-PALPAZIONE ROBOTICA CON CONTROLLO GESTUALE E FEEDBACK TATTILE: PUBBLICATO UNO STUDIO DELL’ISTITUTO DI BIOROBOTICA DELLA SCUOLA SANT’ANNA IN GRADO DI FORNIRE INFORMAZIONI SULLA RIGIDEZZA DI NODULI
Permettere ad una persona di apprezzare la rigidezza di un nodulo a distanza mediante robot. È il contenuto dello studio di un gruppo di ricercatori dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna, che presenta lo sviluppo di una piattaforma robotica con controllo gestuale e feedback tattile per riconoscere la presenza di noduli a distanza all’interno di materiali morbidi. Lo studio è stato svolto in collaborazione con il Dipartimento di Ingegneria Meccanica e Aerospaziale dell’Università La Sapienza di Roma, il Dipartimento di Studi Linguistici e Culturali Comparati dell’Università Ca’ Foscari di Venezia, il Dipartimento di Ingegneria dell’Informazione dell’Università di Firenze, l’Istituto di Fisica Applicata “Nello Carrara” del CNR, il Dipartimento di Automatica e Informatica del Politecnico di Torino e l’Università di Belgrado. In prospettiva futura, la possibilità di apprezzare a distanza la rigidezza di oggetti permetterà applicazioni in vari scenari, tra cui chirurgia robotica e teleconsulto in ambito medico e robotica per l’assistenza personale e per il soccorso.
Lo studio è stato realizzato grazie alle sinergie messe in atto tra molteplici progetti di ricerca con scopi complementari. In particolare, la piattaforma robotica è stata sviluppata per applicazioni di diagnostica medica nell’ambito del progetto IMEROS, finanziato dalla Regione Toscana nel programma FAS Salute, il guanto aptico nell’ambito del progetto PARLOMA finanziato dal Ministero dell’Istruzione, dell’Università e della Ricerca, gli algoritmi di controllo nell’ambito del progetto di grande rilevanza Italia-Serbia finanziato dal Ministero degli Affari Esteri e della Cooperazione Internazionale, gli algoritmi di feedback in collaborazione con INAIL nell’ambito del progetto MOTU, e lo scenario di telepresenza è stato sperimentato nell’ambito di un progetto finanziato dalla Dubai Future Foundation attraverso la piattaforma Guaana.com.
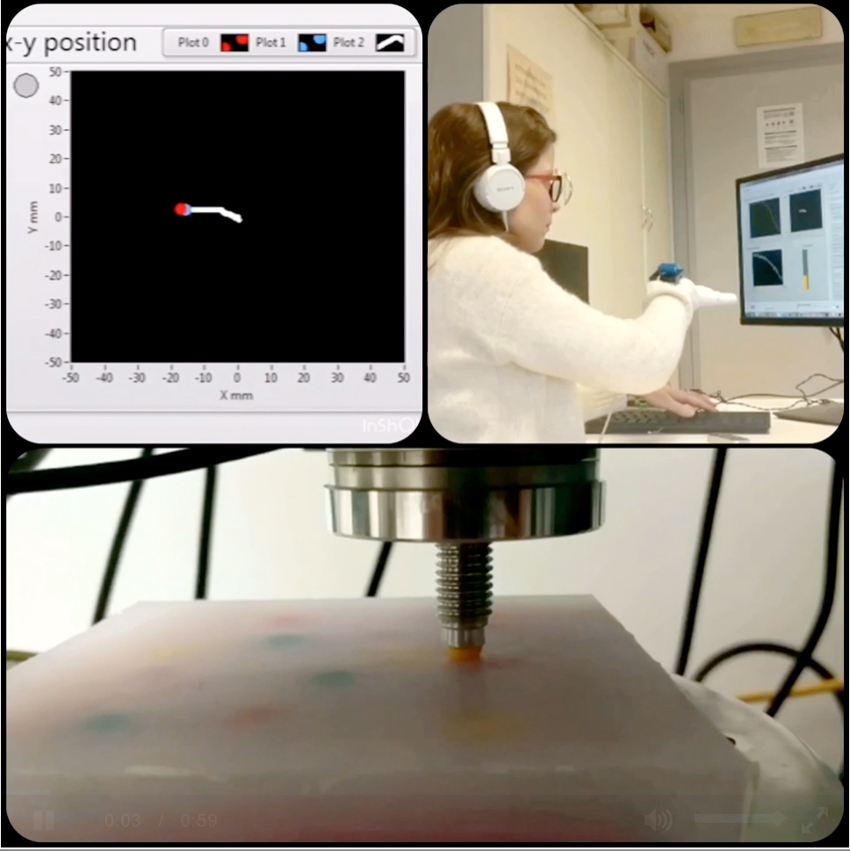
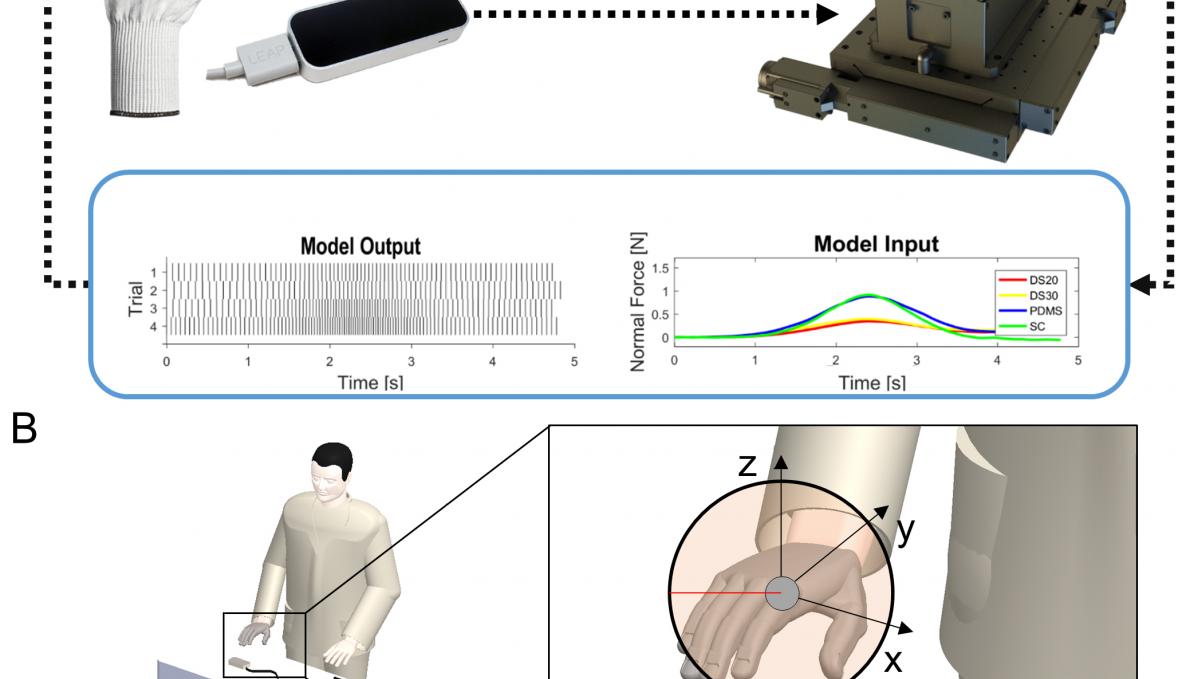
“Presentiamo un nuovo apparato per telepalpazione – interviene Luca Massari, che sta concludendo il dottorato di ricerca presso l’Istituto di BioRobotica della Scuola Sant’Anna ed è attualmente borsista di ricerca dell’Università Ca’ Foscari di Venezia – che consente ad un utente di esplorare liberamente un oggetto, nello specifico un phantom siliconico, al fine di riconoscere la presenza di noduli (materiali con differente rigidezza inclusi all’interno della matrice polimerica). Grazie al controllo gestuale e basandosi esclusivamente sul ritorno tattile somministrato, l’identificazione avviene in tempo reale, in assenza di un contatto fisico tra la mano dell’utente e l’oggetto investigato, che potrebbe trovarsi in un altro continente”.
La rigidezza del phantom e dei materiali in esso allocati è stata codificata utilizzando un modello neuromorfo e riprodotta sul polpastrello dell'indice dell’utente remoto grazie ad un guanto aptico integrato con un trasduttore piezoelettrico.
“Abbiamo valutato l'efficacia di questo feedback nel consentire l’identificazione in tempo reale in due condizioni sperimentali di telepresenza - spiega Jessica D’Abbraccio, dottoranda di ricerca dell’Istituto di BioRobotica della Scuola Sant’Anna -: nella prima, la “ILS” (In Line of Sight), la piattaforma e l’utente si trovavano nel medesimo ambiente; nella seconda “NILS” (Not In Light of Sight), invece, più impegnativa, la piattaforma è stata spostata a 50 chilometri di distanza".
Durante gli esperimenti, agli utenti è stato chiesto di riconoscere aree più rigide all’interno dell’oggetto di test e quattro sono state le gomme utilizzate per ottenere i 12 noduli emisferici di 5 millimetri di raggio, casualmente disposti al suo interno.
“Questa attività è frutto di una collaborazione ben avviata tra i nostri gruppi di ricerca, che ha interessato anche studenti e ricercatori dei vari enti, coinvolti in periodi di studio e di attività sperimentali congiunte,” aggiungono Eduardo Palermo, ricercatore di Misure meccaniche e Biomeccanica de “La Sapienza” Università di Roma e Lorenzo Capineri, professore associato di Elettronica dell’Università di Firenze.
“Questo lavoro valuta la fruibilità del sistema tattile sviluppato in tele-palpazione robotica, per localizzare, durante l’esplorazione attiva, noduli inseriti all’interno di una matrice più morbida – conclude Calogero Oddo, coordinatore dello studio svolto in collaborazione con la professoressa Arianna Menciassi -. Le tecnologie abilitanti sviluppate saranno applicate in vari ambiti: dalla bioingegneria all’Industria 4.0.”.
RIFERIMENTI DELL’ARTICOLO:
Jessica D’Abbraccio, Luca Massari, Sahana Prasanna, Laura Baldini, Francesca Sorgini, Giuseppe Airò Farulla, Andrea Bulletti, Marina Mazzoni, Lorenzo Capineri, Arianna Menciassi, Petar Petrovic, Eduardo Palermo e Calogero Maria Oddo, Haptic Glove and Platform with Gestural Control For Neuromorphic Tactile Sensory Feedback In Medical Telepresence, Sensors 2019.