Healthcare Mechatronics Laboratory

La robotica medica ha le potenzialità di cambiare radicalmente il metodo, l’approccio chirurgico e la medicina interventistica all’interno di un ampio scenario che sfrutta i punti di forza complementari dell'uomo e della tecnologia moderna.
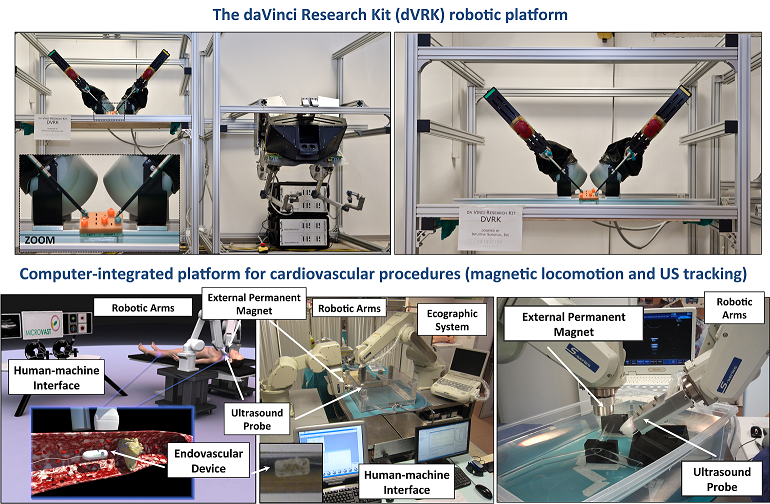
I sistemi robotici per chirurgia sono sistemi integrati (ovvero sistemi chirurgici per intervento o per assistenza basati, ad esempio, su tecnologie robotiche di sensing, attuazione, comunicazione, etc.) nei quali il robot, o lo strumentario robotico, è di per sè un solo elemento, generalmente l'end-effector, di una piattaforma complessa “computer-assisted”.
La piattaforma robotica è progettata per assistere il chirurgo, con un controllo pre-programmato/semiautonomo, teleoperato e/o assistito in un ambiente cooperativo fra uomo e macchina nello svolgimento di una procedura interventistica che può comprendere una pianificazione pre-operatoria, una registrazione intraoperatoria delle informazioni ottenute precedentemente all’intervento, l'uso combinato di strumenti controllati manualmente o roboticamente per eseguire l'intervento così, come precedentemente pianificato, per verifica postintervento e per follow-up.
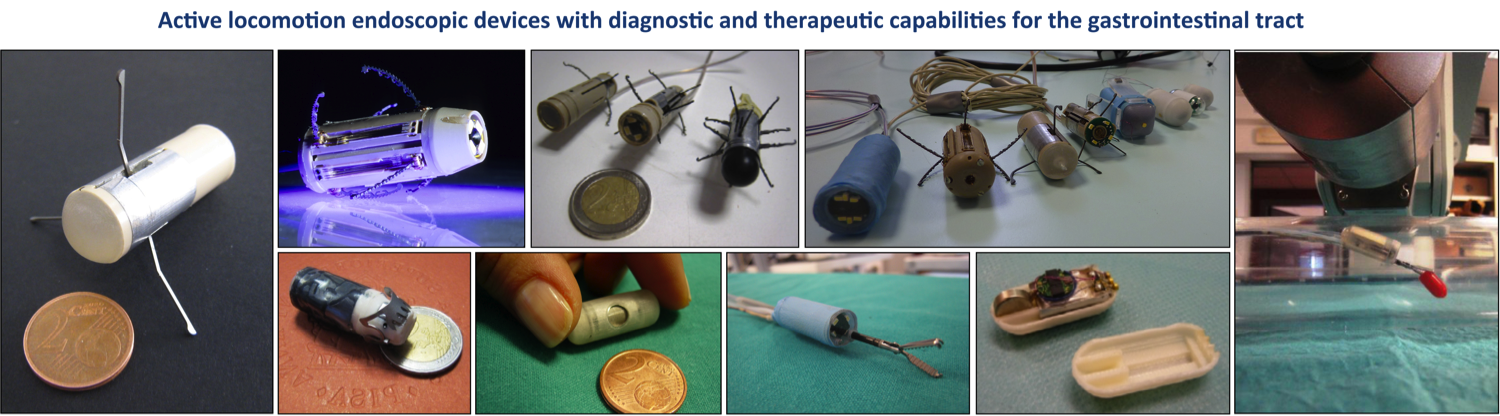
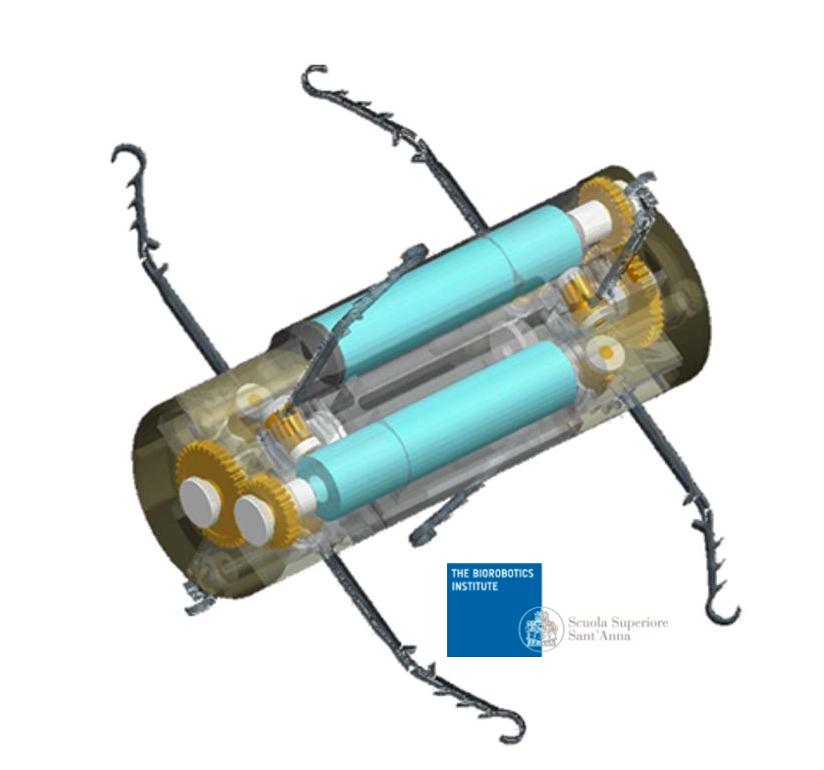
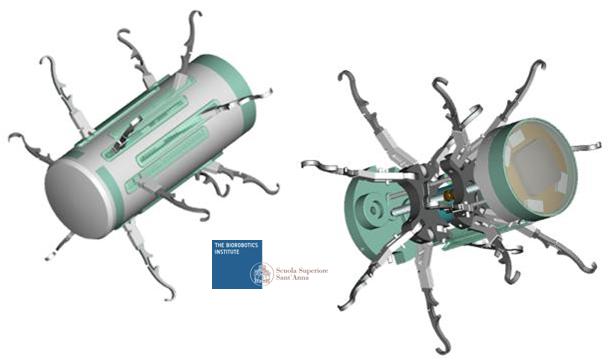
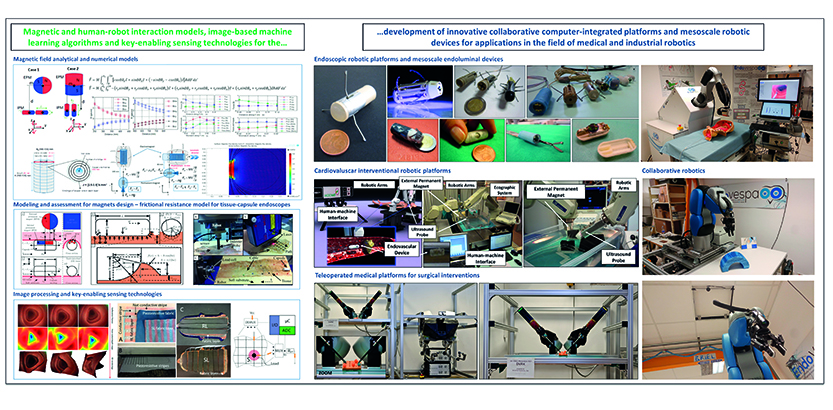
All'interno di questo scenario, la missione dell'Healthcare Mechatronics Laboratory riguarda lo studio, la progettazione, la realizzazione e la validazione clinica di piattaforme integrate e sistemi intelligenti come mezzi attivi per garantire una terapia e una diagnosi che siano efficaci, affidabili e minimamente invasivi.
Responsabile scientifico
Prof. Gastone Ciuti
e-mail: gastone.ciuti@santannapisa.it
Tel.: 050-883072
Paper selezionati
- L. Sliker, G. Ciuti, M. Rentschler, A. Menciassi, Magnetically driven medical devices: a review, Expert Review of Medical Devices, 2015 Aug 21:1-16.
- L. Sliker, G. Ciuti, Flexible and capsule endoscopy for screening, diagnosis and treatment, Expert Review of Medical Devices, 1(6):649-66, 2014. IF 1.683.
- P. Valdastri, G. Ciuti, A. Verbeni. A. Menciassi, P. Dario, A. Arezzo, M. Morino, Magnetic air capsule robotic system: proof of concept of a novel approach for painless colonoscopy. Surgical Endoscopy, vol. 26, no. 5, 1238-1246, 2012 - Winner of the Best Technology Contribution Award at EAES2011.
- G. Ciuti, P. Valdastri, A. Menciassi and P. Dario, Robotic magnetic steering and locomotion of capsule endoscope for diagnostic and surgical endoluminal procedures. Robotica, vol. 28, pp. 199-207, 2010.
- G. Ciuti, R. Donlin, P. Valdastri, A. Arezzo, A. Menciassi, M. Morino and P. Dario, Robotic versus manual control in magnetic steering of an endoscopic capsule. Endoscopy, vol. 42, pp. 148-152, 2010.
Progetti
- Progetto ARONA 'Navigazione chirurgica assistita da robotica avanzata', finanziato attraverso bando PNR 2015-2020 PON “Ricerca e Innovazione” 2014-2020