Human-Robot-Interaction Laboratory

Il Laboratorio di Human Robot Interaction (HRI) è dedicato al progresso della comprensione e dello sviluppo di sistemi robotici che si integrano perfettamente con gli ambienti e le attività umane. La nostra ricerca si concentra su diverse aree chiave che colmano il divario tra la robotica, l'interazione umana e l'innovazione tecnologica.
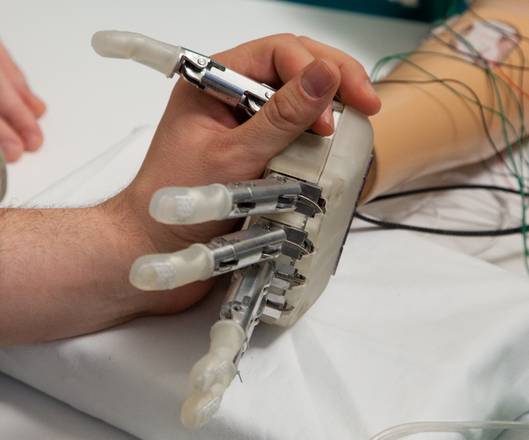
Manipolazione Robotica e Protesi: Il nostro lavoro si concentra sulla progettazione, il controllo e l'applicazione di mani artificiali destre, con una forte enfasi sia sulla manipolazione protesica che robotica. Inizialmente incentrata sulla sostituzione funzionale della mano per amputati, la nostra ricerca si è evoluta per includere applicazioni robotiche collaborative e non collaborative. Esploriamo la sintesi delle strategie di manipolazione umana in algoritmi artificiali, migliorando l'adattabilità e l'efficienza dei sistemi robotici in ambienti diversi. Questo include lo sviluppo di protesi mioelettriche leggere e destre che incorporano meccanismi di sinergia per supportare una vasta gamma di tipi di presa, migliorando significativamente le attività quotidiane degli utenti di protesi.
Interazione Uomo-Robot: Comprendere le dinamiche delle interazioni uomo-uomo e uomo-robot è un pilastro della nostra ricerca. Studiamo i fattori critici che influenzano la coordinazione della forza di presa, la selezione dei tipi di presa e i fattori contestuali che impattano le attività collaborative. I nostri studi mirano a stabilire linee guida per promuovere una convivenza sana, efficiente e intuitiva tra esseri umani e robot, garantendo che i sistemi robotici possano adattarsi a scenari reali e soddisfare efficacemente le esigenze degli utenti.
Strategie di Controllo Avanzate per Sistemi Semi-Autonomi: Ci concentriamo sullo sviluppo di strategie di controllo avanzate che consentano ai sistemi semi-autonomi di operare efficacemente al fianco degli esseri umani. Questo include algoritmi di pianificazione del movimento che permettono ai robot di adattarsi e coordinarsi con i partner umani anche in condizioni dinamiche e imprevedibili. La nostra ricerca evidenzia l'importanza della tempistica dei segnali e la sua influenza sul lavoro di squadra uomo-robot, aprendo la strada a sistemi robotici più reattivi e intelligenti.
Ricerca Traslazionale e Applicazioni Reali: Impegnati ad affrontare sfide reali, la nostra ricerca va oltre i modelli teorici per applicazioni pratiche. Sviluppiamo nuovi strumenti di valutazione per analizzare la funzione della mano negli amputati e garantiamo che i progressi nella tecnologia protesica e robotica siano radicati in principi di progettazione centrati sull'utente. Il nostro lavoro è supportato da collaborazioni con gruppi di ricerca diversificati, partnership industriali e finanziamenti significativi da bandi competitivi e investimenti privati.
Il Laboratorio HRI continua a spingere i confini della robotica e dell'interazione uomo-macchina, guidato dalla passione per la scoperta, il rigore scientifico e l'obiettivo di creare tecnologie che migliorino le capacità umane e la qualità della vita.
Pubblicazioni selezionate (recenti)
- Controzzi, M., Angelini, L., Randi, ... & Cipriani, C. (2024). Assessing Hand Function in Trans-Radial Amputees Wearing Myoelectric Hands: The Virtual Eggs Test (VET). IEEE Transactions on Neural Systems and Rehabilitation Engineering.
- Ortiz-Catalan, M., Zbinden, J., Millenaar, J., D’Accolti, D., Controzzi, M., Clemente, F., ... & Branemark, R. (2023). A highly integrated bionic hand with neural control and feedback for use in daily life. Science Robotics, 8(83), eadf7360.
- Iori, F., Perovic, G., Cini, F., Mazzeo, A., Falotico, E., & Controzzi, M. (2023). DMP-based reactive robot-to-human handover in perturbed scenarios. International Journal of Social Robotics, 15(2), 233-248.
- Cini, F., Banfi, T., Ciuti, G., Craighero, L., & Controzzi, M. (2021). The relevance of signal timing in human-robot collaborative manipulation. Science Robotics, 6(58), eabg1308.
- Cini, F., Ortenzi, V., Corke, P., & Controzzi, M. (2019). On the choice of grasp type and location when handing over an object. Science Robotics, 4(27), eaau9757.
- Controzzi, M., Singh, H., Cini, F., Cecchini, T., Wing, A., & Cipriani, C. (2018). Humans adjust their grip force when passing an object according to the observed speed of the partner’s reaching out movement. Experimental brain research, 236, 3363-3377.
- Controzzi, M., Clemente, F., Barone, D., Ghionzoli, A., & Cipriani, C. (2016). The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(5), 459-468.
Progetti in corso
2023-2025 National Project, CALLIOPE - lattiCe bAsed uLtra LIght sensOrized upper limb ProsthEsis, call: PRIN 2022. Role: Coordinator.
Project Synopsis: Modern robotic prostheses still face limitations and lack personalization. CALLIOPE aims to develop a lightweight, customizable, and affordable upper limb prosthesis with integrated tactile sensing, leveraging topological optimization and additive manufacturing. The project enhances lattice structures for greater strength, durability, and customization while optimizing fatigue resistance.
2023-2026 European Project - Next Generation Europe FIT4MEDROB - Fit for Medical Robotics role: Co-Principal Investigator.
Project Synopsis: Fit for Medical Robotics aims to cover technological, economical, legal and policy gaps currently present in the Italian healthcare system, that have prevented nationwide clinical adoption of first-class, patient specific therapies/treatments, robotic and digital treatments. Within the project, my research unit is investigating new tests and methods for assessing human dexterity, focusing on two use cases: post-stroke adults and children with cerebral palsy.
2023-2026 European Project - Next Generation Europe Tuscany Health Ecosystem – Spoke 9: Robotics and Automation for Health role: Co-Principal Investigator.
Project Synopsis: Within Spoke 9, my research unit is exploring how shared autonomy can enhance remote teleoperation. This includes leveraging gaze tracking to infer user intent and enabling autonomous robot behavior to assist operators in dexterous manipulations.
2021-2025 European Project B-CRATOS (Wireless Brain-Connect inteRfAce TO machineS: B-CRATOS), call: H2020-FETOPEN-2018-2020, role: WP Leader and Principal Investigator.
Project Synopsis: B-CRATOS aims to develop a revolutionary biohybrid brain-machine interface enabling wireless, bidirectional communication between the brain and external devices. The project seeks to enhance neuroprosthetic control and sensory feedback. Within the project, my research unit is leading the work package dedicated to developing the sensorized hand and decoding neural signals for intuitive control.
2020-2024 European Project APRIL (multipurpose robotics for mAniPulation of defoRmable materIaLs in manufacturing processes), call: H2020-NMBP-FOF-2019, role: WP Leader and Principal Investigator.
Project Synopsis: The APRIL project aims to advance flexible and autonomous robotic solutions for assembly, packaging, and logistics across various industries. Within the project, my research unit leads the development of the low-level control layer responsible for executing the robot’s dexterous actions. Additionally, we have developed a high-level reasoning algorithm inspired by human behavior to select the optimal grasp strategy based on contextual factors.
Recently ended projects (partial list)
2020-2023 INAIL project, BioArm - Portable exoskeleton for the rehabilitation of the arm, role: Co-Principal Investigator.
2019-2023 Industrial research contract with INPECO SA, ALA2021 (Advanced Laboratory Automation), role: Coordinator.
Responsabile scientifico
Dott. Marco Controzzi
e-mail: marco.controzzi@santannapisa.it
Tel.: 050-883460