Human-Robot-Interaction Laboratory
The Human-Robot Interaction (HRI) Laboratory is dedicated to advancing the understanding and development of robotic systems that seamlessly integrate with human environments and activities.

The Human-Robot Interaction (HRI) Laboratory is dedicated to advancing the understanding and development of robotic systems that seamlessly integrate with human environments and activities. Our research focuses on several key areas that bridge the gap between robotics, human interaction, and technological innovation.
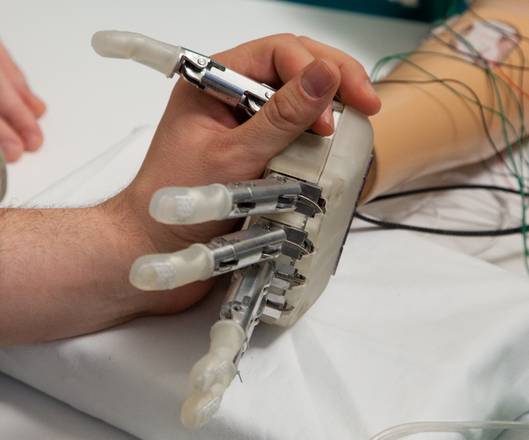
Robotic Manipulation and Prosthetics: Our work delves into the design, control, and application of dexterous artificial hands, with a strong emphasis on both prosthetic and robotic manipulation. Initially centered on functional hand replacements for amputees, our research has evolved to encompass collaborative and non-collaborative robotic applications. We explore the synthesis of human manipulation strategies into artificial algorithms, enhancing the adaptability and efficiency of robotic systems in diverse environments. This includes the development of lightweight, dexterous myoelectric prostheses that incorporate synergy mechanisms to support a wide range of grasp types, significantly improving activities of daily living for prosthetic users.
Human-Robot Interaction (HRI): Understanding the dynamics of human-human and human-robot interactions is a cornerstone of our research. We investigate the critical factors that influence grip force coordination, the selection of grasp types, and the contextual factors that impact collaborative tasks. Our studies aim to establish guidelines for promoting healthy, efficient, and intuitive coexistence between humans and robots, ensuring that robotic systems can adapt to real-world scenarios and meet user needs effectively.
Advanced Control Strategies for Semi-Autonomous Systems: We focus on developing advanced control strategies that enable semi-autonomous systems to operate effectively alongside humans. This includes motion-planning algorithms that allow robots to adapt and coordinate with human partners even under dynamic and unpredictable conditions. Our research highlights the importance of signal timing and its influence on human-robot teamwork, paving the way for more responsive and intelligent robotic systems.
Translational Research and Real-World Applications: Committed to addressing real-world challenges, our research extends beyond theoretical models to practical applications. We develop novel evaluation tools for assessing hand function in amputees and ensure that advancements in prosthetic and robotic technology are grounded in user-centered design principles. Our work is supported by collaborations with diverse research groups, industry partnerships, and substantial funding from competitive grants and private investments.
The HRI Laboratory continues to push the boundaries of robotics and human-machine interaction, driven by a passion for discovery, scientific rigor, and the goal of creating technologies that enhance human capabilities and improve quality of life.
Selected (recent) publications
- Controzzi, M., Angelini, L., Randi, ... & Cipriani, C. (2024). Assessing Hand Function in Trans-Radial Amputees Wearing Myoelectric Hands: The Virtual Eggs Test (VET). IEEE Transactions on Neural Systems and Rehabilitation Engineering.
- Ortiz-Catalan, M., Zbinden, J., Millenaar, J., D’Accolti, D., Controzzi, M., Clemente, F., ... & Branemark, R. (2023). A highly integrated bionic hand with neural control and feedback for use in daily life. Science Robotics, 8(83), eadf7360
- Iori, F., Perovic, G., Cini, F., Mazzeo, A., Falotico, E., & Controzzi, M. (2023). DMP-based reactive robot-to-human handover in perturbed scenarios. International Journal of Social Robotics, 15(2), 233-248.
- Cini, F., Banfi, T., Ciuti, G., Craighero, L., & Controzzi, M. (2021). The relevance of signal timing in human-robot collaborative manipulation. Science Robotics, 6(58), eabg1308.
- Cini, F., Ortenzi, V., Corke, P., & Controzzi, M. (2019). On the choice of grasp type and location when handing over an object. Science Robotics, 4(27), eaau9757.
- Controzzi, M., Singh, H., Cini, F., Cecchini, T., Wing, A., & Cipriani, C. (2018). Humans adjust their grip force when passing an object according to the observed speed of the partner’s reaching out movement. Experimental brain research, 236, 3363-3377.
- Controzzi, M., Clemente, F., Barone, D., Ghionzoli, A., & Cipriani, C. (2016). The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(5), 459-468.
Ongoing projects
2023-2025 National Project, CALLIOPE - lattiCe bAsed uLtra LIght sensOrized upper limb ProsthEsis, call: PRIN 2022. Role: Coordinator.
Project Synopsis: Modern robotic prostheses still face limitations and lack personalization. CALLIOPE aims to develop a lightweight, customizable, and affordable upper limb prosthesis with integrated tactile sensing, leveraging topological optimization and additive manufacturing. The project enhances lattice structures for greater strength, durability, and customization while optimizing fatigue resistance.
2023-2026 European Project - Next Generation Europe FIT4MEDROB - Fit for Medical Robotics role: Co-Principal Investigator.
Project Synopsis: Fit for Medical Robotics aims to cover technological, economical, legal and policy gaps currently present in the Italian healthcare system, that have prevented nationwide clinical adoption of first-class, patient specific therapies/treatments, robotic and digital treatments. Within the project, my research unit is investigating new tests and methods for assessing human dexterity, focusing on two use cases: post-stroke adults and children with cerebral palsy.
2023-2026 European Project - Next Generation Europe Tuscany Health Ecosystem – Spoke 9: Robotics and Automation for Health role: Co-Principal Investigator.
Project Synopsis: Within Spoke 9, my research unit is exploring how shared autonomy can enhance remote teleoperation. This includes leveraging gaze tracking to infer user intent and enabling autonomous robot behavior to assist operators in dexterous manipulations.
2021-2025 European Project B-CRATOS (Wireless Brain-Connect inteRfAce TO machineS: B-CRATOS), call: H2020-FETOPEN-2018-2020, role: WP Leader and Principal Investigator.
Project Synopsis: B-CRATOS aims to develop a revolutionary biohybrid brain-machine interface enabling wireless, bidirectional communication between the brain and external devices. The project seeks to enhance neuroprosthetic control and sensory feedback. Within the project, my research unit is leading the work package dedicated to developing the sensorized hand and decoding neural signals for intuitive control.
2020-2024 European Project APRIL (multipurpose robotics for mAniPulation of defoRmable materIaLs in manufacturing processes), call: H2020-NMBP-FOF-2019, role: WP Leader and Principal Investigator.
Project Synopsis: The APRIL project aims to advance flexible and autonomous robotic solutions for assembly, packaging, and logistics across various industries. Within the project, my research unit leads the development of the low-level control layer responsible for executing the robot’s dexterous actions. Additionally, we have developed a high-level reasoning algorithm inspired by human behavior to select the optimal grasp strategy based on contextual factors.
Recently ended projects (partial list)
2020-2023 INAIL project, BioArm - Portable exoskeleton for the rehabilitation of the arm, role: Co-Principal Investigator.
2019-2023 Industrial research contract with INPECO SA, ALA2021 (Advanced Laboratory Automation), role: Coordinator.
Principal Investigator
Dott. Marco Controzzi
e-mail: marco.controzzi@santannapisa.it
Phone: 050-883460