Ricerca
Puntiamo a tradurre i meccanismi della mobilità cellulare in nuovi design di microrobot mobili, e a realizzare modelli microrobotici per testare ipotesi su specifici comportamenti cellulari (es. la locomozione e migrazione delle cellule nei tessuti corporei)
Linee di ricerca
Microrobot ultra-deformabili
Prendendo ispirazione dalle cellule ameboidi, stiamo realizzando dei microrobot ultra-deformabili che siano in grado di attraversare aperture molto più piccole della loro stessa dimensione corporea. Stiamo studiando metodi per fabbricare questi microrobot ultra-deformabili e per controllarli, valutando il loro movimento in ambienti confinati che mimino i tessuti molli. Le attività collegate sono:
- fabbricazione di capsule di idrogeli
- fabbricazione di vescicole (magnetiche) e controllo delle loro proprietà meccaniche
- deformazione e movimento magnetico di vescicole (in ambiente confinato)
- fabbricazione di phantom di tessuti molli
Microrobot energeticamente autonomi
Per rendere i microrobot capaci di sfruttare l'energia presente nel loro ambiente per il movimento, stiamo studiando diversi modi di generare movimenti corporei auto-alimentati. Le attività collegate sono:
- fabbricazione di particelle attive (auto-propellenti) e studio del loro meccanismo di propulsione
- caricamento di vescicole con particelle auto-propellenti e studio del loro movimento
- interazioni tra particelle auto-propellenti e tra particelle e membrane di vescicole
- simulazione di comportamenti collettivi di particelle auto-propellenti
Percezione per microrobot
Studiamo l'implementazione di capacità percettive nei microrobot. In particolare, per rendere i microrobot capaci di seguire gradienti di pH, concentrazione di ossigeno, e temperatura, stiamo studiando metodi per rendere la membrana delle vescicole responsiva ed in grado di orientare il movimento interno delle particelle auto-propellenti. Le attività collegate sono:
- fabbricazione di vescicole responsive al pH
- simulazione di comportamenti collettivi di particelle auto-propellenti al variare della forma del confinamento
Controllo esterno di microrobot
Per dotare i microrobot di autonomia supervisionata, stiamo studiando metodi di controllo esterno complementari ai meccanismi di movimento autonomo. Le attività collegate sono:
- controllo magnetico di vescicole in ambienti confinati e porosi
- interazione tra vescicole e ultrasuoni

Finanziamenti
Il Microscale Robotics Laboratory è stato istituito grazie allo Starting Grant del Consiglio Europeo della Ricerca CELLOIDS (ERC, H2020, GA:948590), che rappresenta la nostra principale fonte di finanziamento.
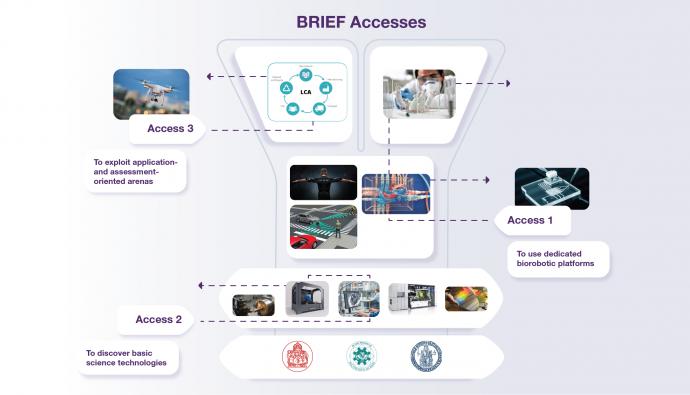
Il nostro gruppo è coinvolto anche nei progetti BRIEF e THE finanziati dal MUR all'interno del PNRR.