CELLOIDS
Dispositivi robotici di dimensioni microscopiche, conosciuti anche come microrobot, potrebbero un giorno permettere rivoluzionarie procedure mediche non invasive. I microrobot attuali, però, non riescono a muoversi nei tessuti e nei fluidi corporei perché le loro funzionalità intrinseche sono molto limitate.
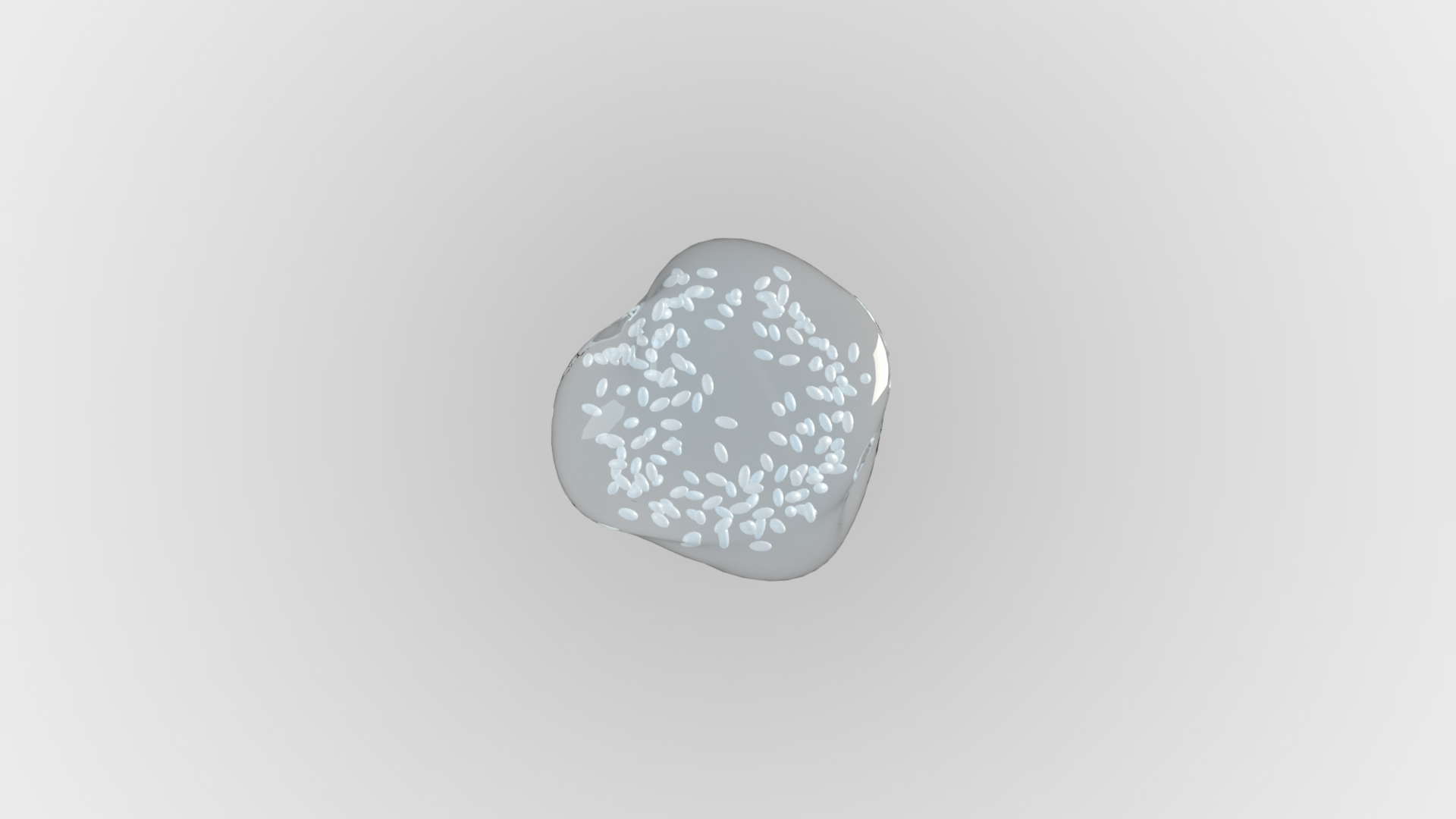
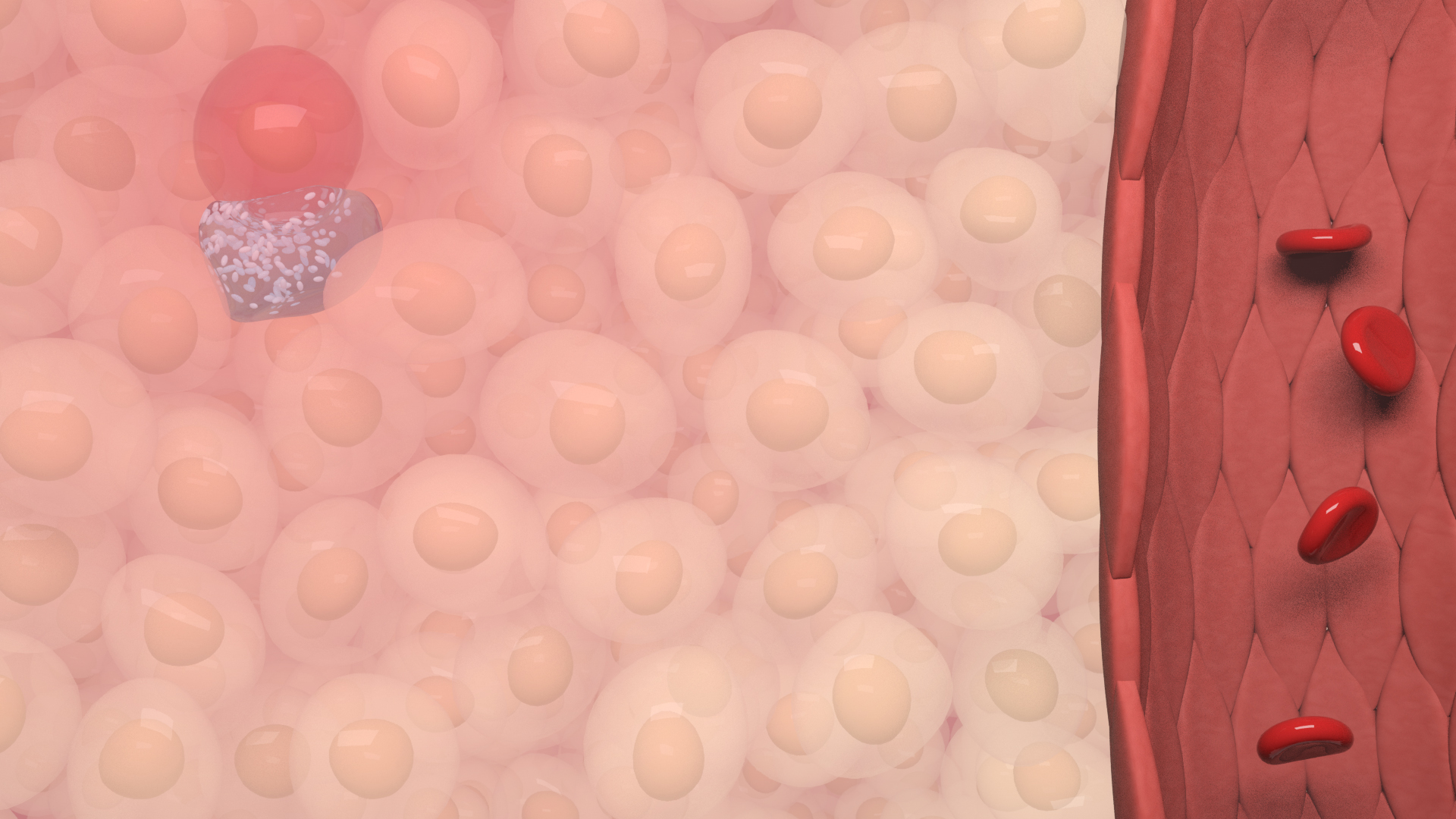
Il progetto CELLOIDS affronterà esattamente questa sfida, con l'obiettivo di realizzare microrobot autosufficienti che possano muoversi autonomamente nei tessuti corporei. A questo scopo, prenderemo ispirazione dalle cellule che naturalmente si muovono attraverso i tessuti corporei, e in particolare dalle cellule del sistema immunitario (i cosiddetti globuli bianchi). Alcune di queste, infatti, sono capaci di modificare continuamente la loro forma corporea e "infilarsi" nei minuscoli interstizi presenti nei tessuti biologici. Svilupperemo quindi dei microrobot capaci di imitare questo tipo di movimento cellulare, noto come movimento ameboide, modificando autonomamente la propria forma corporea e adattandosi all'ambiente circostante. I microrobot, che avranno un corpo liquido contenente uno sciame di particelle auto-propellenti, percepiranno stimoli ambientali e segnali di controllo esterni, e si orienteranno autonomamente attraverso mezzi complessi simili ai tessuti biologici.
Il progetto CELLOIDS dimostrerà un metodo radicalmente nuovo di realizzare microrobot e getterà le basi per la realizzazione dei primi microrobot al mondo capaci di farsi strada autonomamente attraverso i tessuti corporei. Questi microrobot ispirati alle cellule, o 'celloidi', costituiranno anche un modello robotico per studiare la migrazione delle cellule immunitarie e tumorali nei tessuti corporei. I microrobot celloidi potrebbero infine rendere possibili delle procedure mediche rivoluzionarie, come il monitoraggio continuativo dall'interno del corpo per scopi diagnostici o interventi non invasivi in organi molto delicati.
ENTE FINANZIATORE: ERC - European Research Council
NUMERO DEL PROGETTO: 948590
PERIODO E DURATA: 2021-2026
FINANZIAMENTO: 1,5 M€
COORDINATORE: Stefano Palagi
Per ulteriori informazioni sulla ricerca e sulle posizioni aperte visita la pagina del Microscale Robotics Laboratory.
Risultati