Research
we aim at translating the mechanisms that drive cellular motility into new designs of artificial mobile microrobots, and at realizing microrobotic models for testing hypotheses on specific behaviours in cells
Research directions
Ultra-compliant microrobots
Taking inspiration from amoeboid cells, we are realising ultra-soft microrobots so compliant to move through openings much smaller than their body size. We are studying methods to fabricate such ultra-soft microrobots and to control them, testing their movement in confined environment that could mimic the environment in soft tissues. Related activities are:
- fabrication of hydrogel capsules
- fabrication of (magnetic) GUVs
- magnetic movement of GUVs in confinement
- fabrication of hydrogel tissue phantoms
Energetically autonomous microrobots
To make microrobots capable of exploiting energy in their environment to sustain their movement, we are investigating various ways to generate self-sustained body-shape changes. Related activities are:
- fabrication of active (self-propelled) particles and study of their propulsion mechanism
- loading of vesicles with self-propelled particles and study of their movement
- study of interactions among self-propelled particles and between particles and vesicles' membranes
- simulation of collective behaviours of self-propelled particles
Sensing & perception for microrobots
We address the implementation of sensing and perception capabilities in microrobots. In particular, to make microrobots able to follow gradients of pH, oxygen, and temperature, we are studying methods to make the vesicles' membrane responsive and able to steer the internal movement of self-propelled particles. Related activities are:
- fabrication of pH-responsive vesicles
- simulations of collective behaviours of self-propelled particles as a function of the confinement shape
External control of microrobots
To endow microrobots with supervised autonomy, we are studying external control methods complementary to the autonomous movement mechanisms. related activities are:
- magnetic control of vesicles in confined and porous environments
- interactions between vesicles and ultrasounds

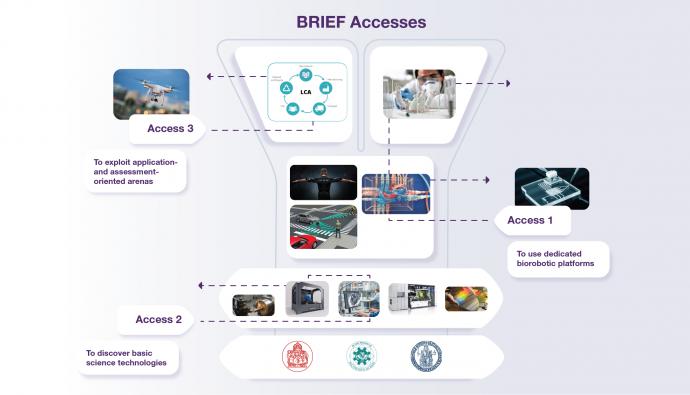
Funding
The Microscale Robotics Laboratory was established thanks to the Starting Grant of the European Research Council CELLOIDS (ERC, H2020, GA:948590), which represent our main funding source.
Our group is also involved in the projects BRIEF and THE within the NRPP (NextGenerationEU).