SOFT ROBOTICS: VERSO NUOVA GENERAZIONE DI AUTOMI SOFFICI IN GRADO DI MUOVERSI ISPIRANDOSI A PRINCIPI DI LOCOMOZIONE ANIMALE. LO "STATO DELL'ARTE" IN UN PAPER
Il punto di partenza è lo studio della natura e della biologia animale. Per creare una nuova generazione di robot morbidi mobili, capaci di compiere molteplici azioni, come ad esempio muoversi delicatamente all’interno del corpo umano oppure esplorare ambianti esterni (profondità marine, ghiacciai, addirittura altri pianeti).
Nel paper “Fundamentals of soft robot locomotion”, pubblicato sulla rivista Journal of the Royal Society Interface, il team di ricerca dell’Istituto di Biorobotica della Scuola Superiore Sant'Anna formato da Marcello Calisti, da Cecilia Laschi e Giacomo Picardi, presenta i principi fondamentali di più di dieci forme di locomozione impiegate in biologia da animali come bruchi, polpi, pesci, uccelli e meduse. Informazioni fondamentali sulla capacità di questi animali di muoversi da uno spazio all’altro che i ricercatori hanno analizzato e sfruttato per creare robot bioinspirati dalle componenti morbide, che presentano una serie di vantaggi: maggiore efficienza energetica, maggiore resistenza ai danni e più stabilità rispetto a disturbi esterni.
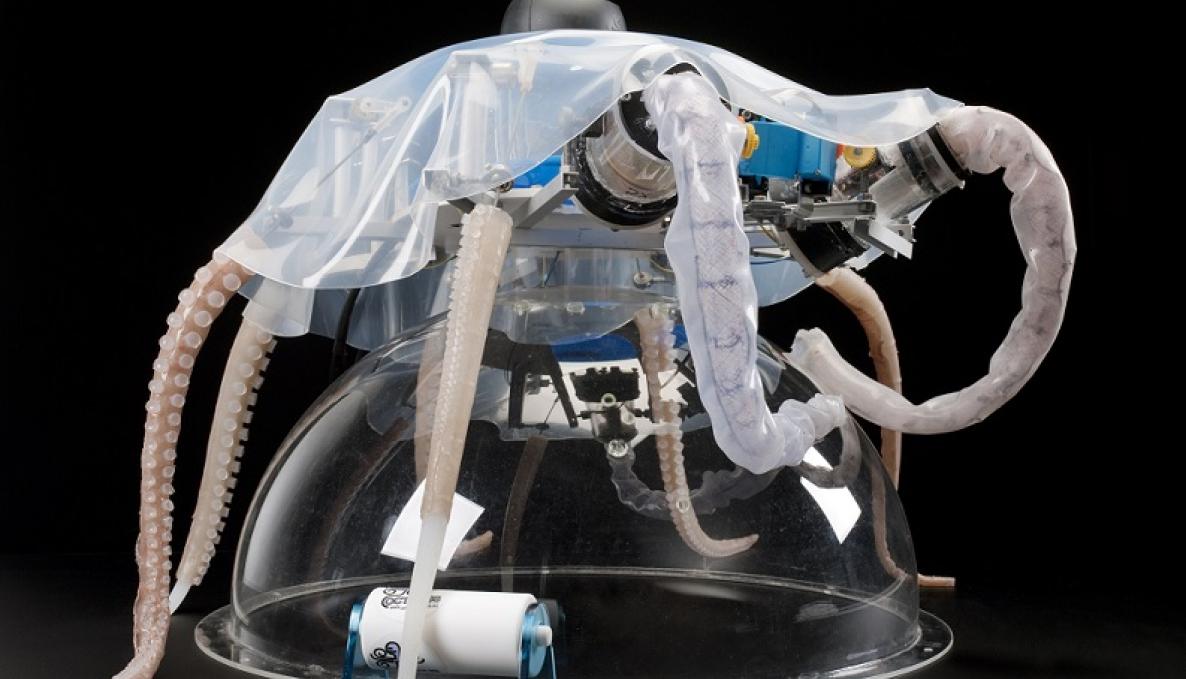
Il paper è solo l’ultimo tassello di un percorso di ricerca sulla soft robotics che ha radici profonde e che nasce con i progetti Octopus, Robosoft e PoseiDRONE, finanziati dalla Commissione Europea e dalla Fondazione Livorno. L’obiettivo è quello di aprire innovative frontiere scientifiche che, partendo dai principi fondamentali della soft robotics, creano nuovi approcci nell’interazione robot-uomo-ambiente naturale.


