TATTO ARTIFICIALE: PUBBLICATO UNO STUDIO CONGIUNTO DELL’ISTITUTO DI BIOROBOTICA DELLA SCUOLA SANT’ANNA E DELL’UNIVERSITÀ CAMPUS BIO-MEDICO DI ROMA PER RICONOSCERE LO SCIVOLAMENTO DEGLI OGGETTI
Avvertire che l’oggetto afferrato sta scivolando e che bisogna prenderlo più saldamente. Questa la funzione che l’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa e l'Università Campus Bio-Medico di Roma, in collaborazione con Fondazione Don Gnocchi, Dipartimento di Studi Linguistici e Culturali Comparati dell’Università Ca' Foscari di Venezia e Istituto Italiano di Tecnologia, hanno studiato per l’applicazione nei polpastrelli biorobotici delle neuroprotesi per persone prive dell’arto superiore.
Lo studio è stato pubblicato dalla rivista scientifica internazionale IEEE Sensors Journal e realizzato col supporto di Inail, Ministero dell’Istruzione, dell’Università e della Ricerca nell’ambito del progetto “Parloma” e Dubai Future Foundation attraverso la piattaforma guaana.com.
Se da un lato la mano umana ha capacità sensoriali straordinarie ed esistono milioni di codici tattili e informazioni complesse che vengono elaborate dal nostro sistema nervoso centrale, dall’altro le mani robotiche non sono tipicamente dotate di sensori tattili capaci di codificare le sensazioni. Dalla temperatura all’umidità, dal senso di dolore alla pressione, le informazioni tattili sono difficili da replicare artificialmente e la mano robotica non è in grado di percepire molte sensazioni quali, ad esempio, lo scivolamento degli oggetti.
Per raggiungere questo risultato, la collaborazione tra Università ed enti di ricerca che hanno condotto questo lavoro ha permesso di sviluppare un algoritmo capace di riconoscere le frequenze delle vibrazioni associate al fenomeno di scivolamento.
"Combinando i segnali tattili di diversi sensori – afferma Rocco Antonio Romeo, primo autore dello studio, che ha conseguito il dottorato di ricerca presso l’Università Campus Bio-Medico di Roma e adesso lavora come post-doc all’Istituto Italiano di Tecnologia – è possibile distinguere l’inizio dello scivolamento di un oggetto in tempi comparabili con quelli della fisiologia umana".
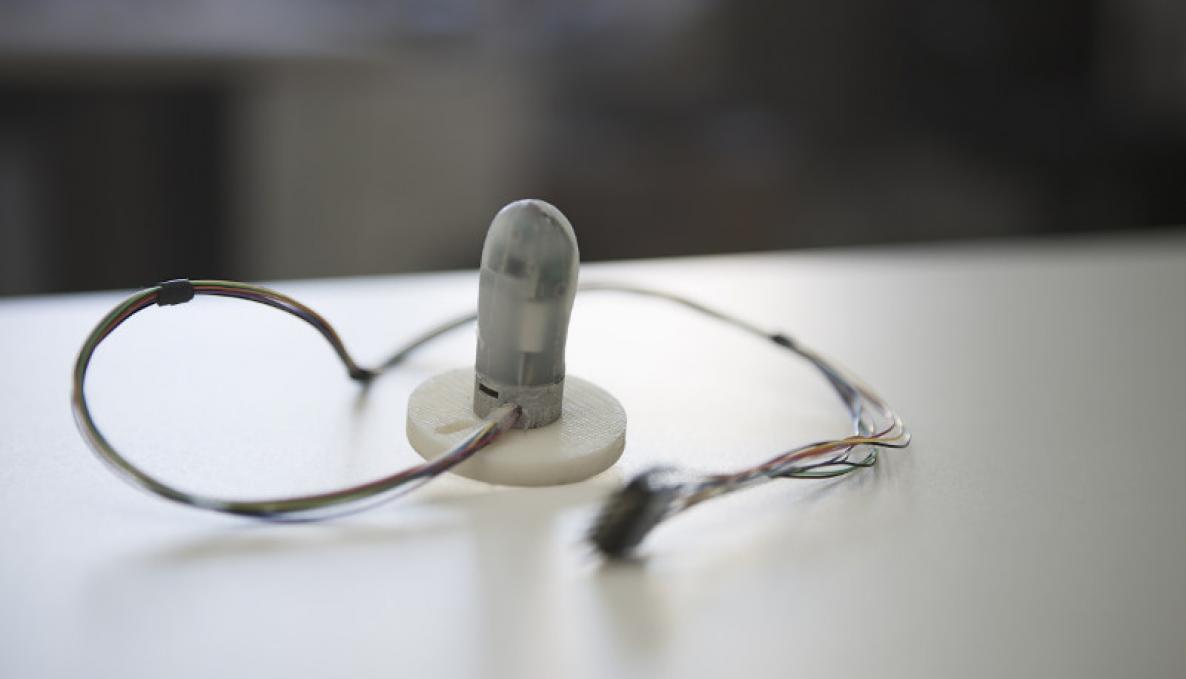
"Per gli esperimenti abbiamo usato un dito bionico realizzato con stampa 3D e piattaforme robotiche – spiega Calogero Oddo, coordinatore dello studio e ricercatore dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna – Ogni sensore tattile ha diversi canali ed è coperto da uno strato di materiale soffice con caratteristiche simili alla pelle. Abbiamo dimostrato la capacità di riconoscere lo scivolamento in meno di 5 centesimi di secondo tramite i nostri sensori e algoritmi, in modo da poter prevenire cadute accidentali".
Il prossimo obiettivo dei ricercatori è testare se queste tecnologie sensibili e l’accuratezza dell’algoritmo possano estendere i risultati di questo studio ad altri ambiti applicativi quali la chirurgia robotica, la robotica collaborativa e per l’assistenza personale.
"Riuscire ad individuare l’inizio dello scivolamento – spiega Loredana Zollo, co-autore dello studio e responsabile dell’Unità di Robotica Biomedica e Biomicrosistemi presso l’Università Campus Bio-Medico di Roma – rappresenta un tassello fondamentale del controllo della presa; consente infatti di capire che si sta perdendo il contatto con l’oggetto e abilita meccanismi di controllo che permettono di stabilizzare la presa e afferrare l’oggetto più saldamente. Il prossimo obiettivo di ricerca a cui stiamo lavorando è proprio quello di adottare questo tipo di strategie nel controllo delle protesi di arto superiore".
"L’articolo rappresenta un progresso scientifico importante – conclude Maria Chiara Carrozza, docente dell’Istituto di BioRobotica della Scuola Sant’Anna e direttore scientifico della Fondazione Don Gnocchi - sul riconoscimento dello scivolamento degli oggetti afferrati che potrà avere applicazioni per lo sviluppo di protesi avanzate e di mani artificiali per manipolatori robotici da applicare nel campo della robotica sociale".
Riferimenti dell’articolo
Romeo, R. A., Rongala, U. B., Mazzoni, A., Camboni, D., Carrozza, M. C., Guglielmelli, E., Zollo, L., & Oddo, C. M., Identification of slippage on naturalistic surfaces via Wavelet Transform of tactile signals. IEEE Sensors Journal.


