Artificial Hands Area
Research activities in the areas of mechatronics and human-machine interfaces with the goal of developing advanced robotic limbs to be used as thought-controlled prostheses
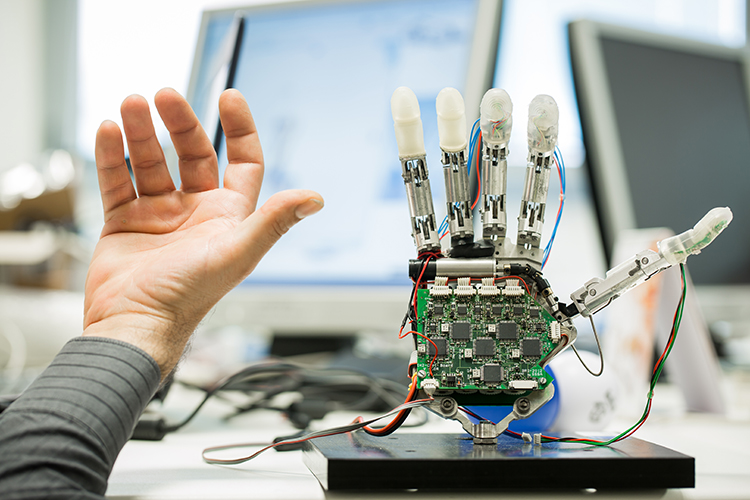
The Artificial Hands Area of the BioRobotics Institute pursues research in mechatronics and human-machine interfaces with the goal of developing advanced robotic limbs to be used as thought-controlled prostheses.
Current research topics include: the (high-tech) observation of the human hand, the design of artificial sensory system; the design of artificial hands, digits, wrists and elbows, their transmission and artificial sensory system; the design of control architectures and intuitive control strategies; the use of biological signals for the physiological control of prehension; the development and clinical validation of bidirectional non-invasive (wearable) interfaces through novel assessment tools; the investigation and comparison of shared-control strategies between user and the prosthesis; the incorporation of sensory feedback strategies into one’s sensorimotor control.
The Artificial Hands Area spun out Prensilia, a company that develops and commercializes artificial hands worldwide, since 2009.
The Artificial Hands Area also includes the Human-Robot-Interaction Laboratory (HRI), coordinated by Dr. Marco Controzzi, the Textile Robotics Lab, coordinated by Dr. Leonardo Cappello, and the REPAIR Lab (Rehabilitation Engineering and Prosthetics Applied Innovation & Research). The HRI Lab develops robust artificial tactile sensors, human-robot interaction, design of mechanisms for safe and efficient interaction between robot and human. The REPAIR Lab results from a collaboration with INAIL Prosthetic Center. The objective is to bridge the engineering research and development with the rehabilitation activities conducted by physicians and therapists in direct contact with the patients.
For more info download the leaflet, watch the Artificial Hands Area video at the bottom of this page and follow our YouTube Channel.
Principal Investigator
Prof. Christian Cipriani
e-mail: christian.cipriani@santannapisa.it
Recent Publications
- V. Ortenzi, M. Controzzi, F. Cini, J. Leitner, M. Bianchi, M. A. Roa, P. Corke, Robotic manipulation and the role of the task in the metric of success, Nature Machine Intelligence, 2019;
- F. Cini, V. Ortenzi, P. Corke, M. Controzzi, On the choice of grasp type and location when handing over an object, Science Robotics, Vol. 4, Issue 27, 2019;
- I. Imbinto, F. Montagnani, M. Bacchereti, C. Cipriani, A. Davalli, R. Sacchetti, E. Gruppioni, S. Castellano, M. Controzzi, The S-Finger: a synergitic externally powered digit with tactile sensing and feedback, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018;
- S.Tarantino, F. Clemente, D. Barone, M. Controzzi, C. Cipriani, The myokinetic control interface: tracking implanted magnets as a means for prosthetic control, Scientific Reports 7, Article number: 17149 (2017);
Watch the video - M. Controzzi, F. Clemente, D. Barone, A. Ghionzoli, C. Cipriani, The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis, IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2016;
- F. Clemente, M. D’Alonzo, M. Controzzi, B. Edin, C. Cipriani, Non-invasive, temporally discrete feedback of object contact and release improves grasp control of closed-loop myoelectric transradial prostheses, IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2015;
- F. Montagnani, M. Controzzi, C. Cipriani, Is it Finger or Wrist Dexterity That is Missing in Current Hand Prostheses? IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no.4, pp. 600-609, 2015;
- M. D'Alonzo, F. Clemente, C. Cipriani, Vibrotactile stimulation promotes embodiment of an alien hand in amputees with phantom sensations, IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 23, no. 3, pp. 450-457, 2015;
- C. Cipriani, J. Segil, A. Birdwell, R. Weir, Dexterous control of a prosthetic hand using fine-wire intramuscular electrodes in targeted extrinsic muscles, IEEE Trans. on Neural Systems and Rehabilitation Engineering, vol. 22, no. 4, pp. 828-836, 2014; Watch the video