Grants
INAIL grants

Motu++
A new generation of lower-limb prostheses for people with a lower extremity amputation

Habilis++
The project aims to develop novel wearable robotic devices for robot-assisted rehabilitation and functional hand recovery of workers affected by occupational diseases or following work-related injuries
BioArm
The project aims to develop an innovative and completely portable upper-limb active orthosis, for patients having brachial plexus injury
BioSup
Innovative and modular solutions for the restoration of urinary function following neurological damage or surgical removal
Mio-Pro
A new human-machine interface for the control of prostheses

ADJOINT 2
Sensorised osseointegrated implants for the treatment of hand finger amputations

BioARMNext
Portable exoskeleton for the rehabilitation and care of the plexus-leso patient: follow-up

BioInterNect
Bi-directional multi-mode bionic interfaces




Individual Grants

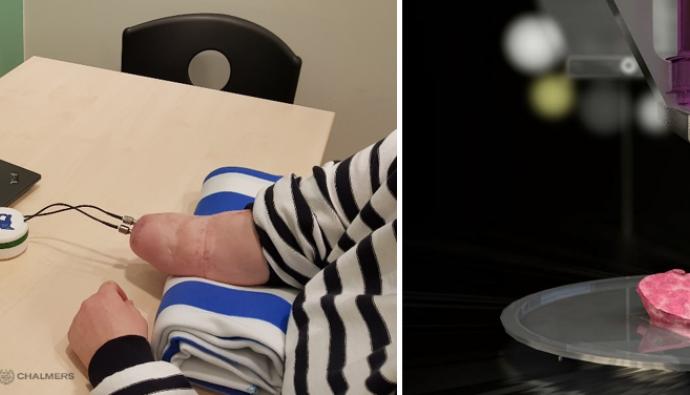
Myki Project
ERC grant coordinated by Christian Cipriani for the development of a dexterous hand prosthesis with tactile sensors that is naturally controlled and perceived by the amputee
CELLOIDS
ERC grant coordinated by Stefano Palagi for the development of microrobots that could autonomously move in soft body tissues

MUSE (MusculoSkeletal Expansion)
ERC Grant to develop and clinically assess soft external muscles (exomuscles) intimately connected and naturally controlled by the user
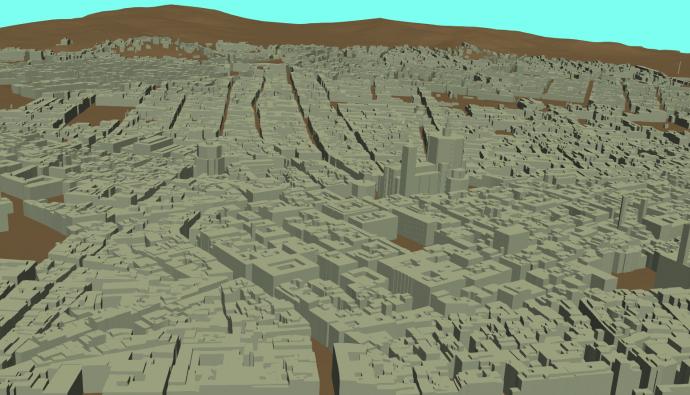
DANTE
Data Aware efficient models of the urbaN microclimaTE GA 101115741
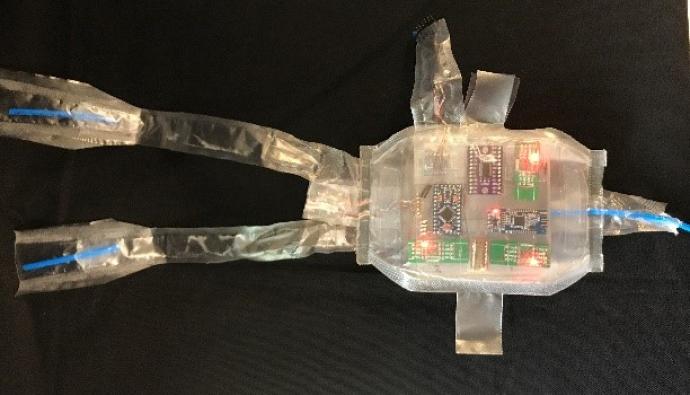
I-BOT
ERC project coordinated by Veronica Iacovacci for the development of implantable microrobots able to navigate in a controlled and non-invasive way through the human body

MYTI
ERC project coordinated by Christian Cipriani aimed at promoting the clinical translation of technology developed within the ERC project MYKI

EpiC
The project aims to find out how plants are affected by electrification and whether the generated charge can be used to power man-made devices

IBRIS
The project aims to develop a new generation of implantable artificial organs capable of fully replacing the functions of compromised native organs.

SURF-UP
The goal of the project is to design, develop and pre-clinically validate a robotic medical system to non-invasively treat oncological diseases

Mambo Project
Development of microrobots able to navigate inside the human body
Hand Project
Methods for creating prosthetic hands which are semi (or potentially even completely) autonomous from the conventional myoelectric human-machine interface

HAND2 project
Development of a complete prosthetic system able to intuitively manage the main phases of human-object interaction