CELLOIDS
Cell-inspired particle-based intelligent microrobots
ERC grant coordinated by Stefano Palagi for the development of microrobots that could autonomously move in soft body tissues
Robotic devices of microscopic size, also known as microrobots, could someday enable revolutionary non-invasive medical procedures.
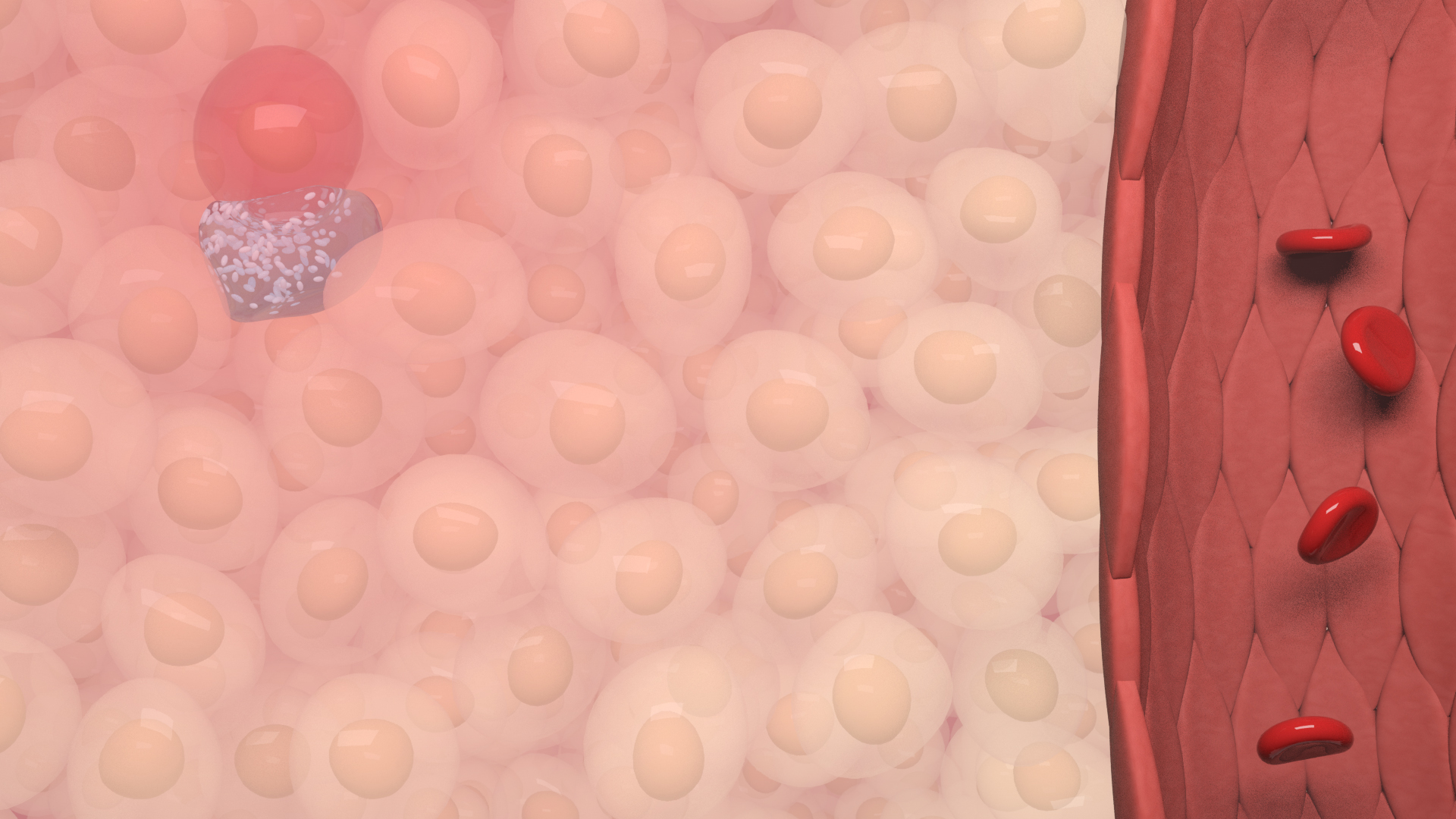
However, current microrobots cannot move in bodily fluids and tissues as they have very limited functionalities on board. Addressing this challenge, CELLOIDS aims at realising self-contained microrobots that could autonomously move in soft body tissues. To this aim, we will take inspiration from biological cells that naturally move through body tissues, such as white blood cells. These continuously change their shape and squeeze through the tiny space between neighbouring cells. We will thus develop microrobots able to mimic this 'amoeboid movement', spontaneously changing their body-shape and adapting it to their surroundings.
The microrobots, consisting of swarms of self-propelled particles in a liquid body, will sense environmental cues and external control signals, and will autonomously find their way through complex tissue-like media. CELLOIDS will establish a radically new method to design microrobots and will result in the first microrobots capable of autonomous navigation of body tissues. The cell-inspired microrobots (or 'celloids') will also constitute a robotic model for studying the migration of immune and cancer cells in body tissues. The celloids will eventually enable revolutionary medical procedures such as long-term monitoring and non-invasive interventions in delicate organs.
FUNDER: ERC - European Research Council
GRANT NO.: 948590
PERIOD: 2021-2026
FUNDING: 1.5 M€
COORDINATOR: Stefano Palagi
For information on the research activities and on open positions please visit the page of the Microscale Robotics Laboratory.
Results
For the latest results, visit our community on Zenodo: https://zenodo.org/communities/celloids

CELLOIDS: cell-inspired microrobots based on synthetic active matter - Go to website - Open new browser tab
Poster presented by Gaia Petrucci at the Active & Intelligent Living Matter conference, held in Erice, Sicily, on June 26 - July 1, 2022.