Habilis++
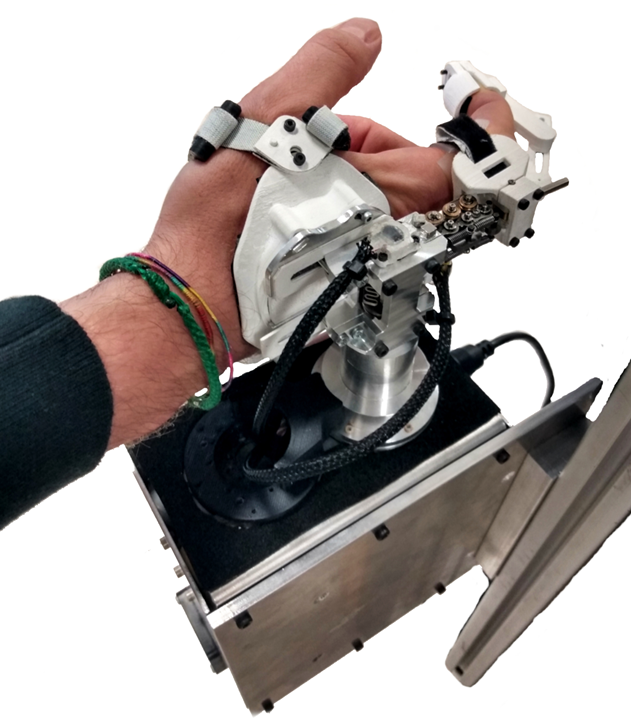
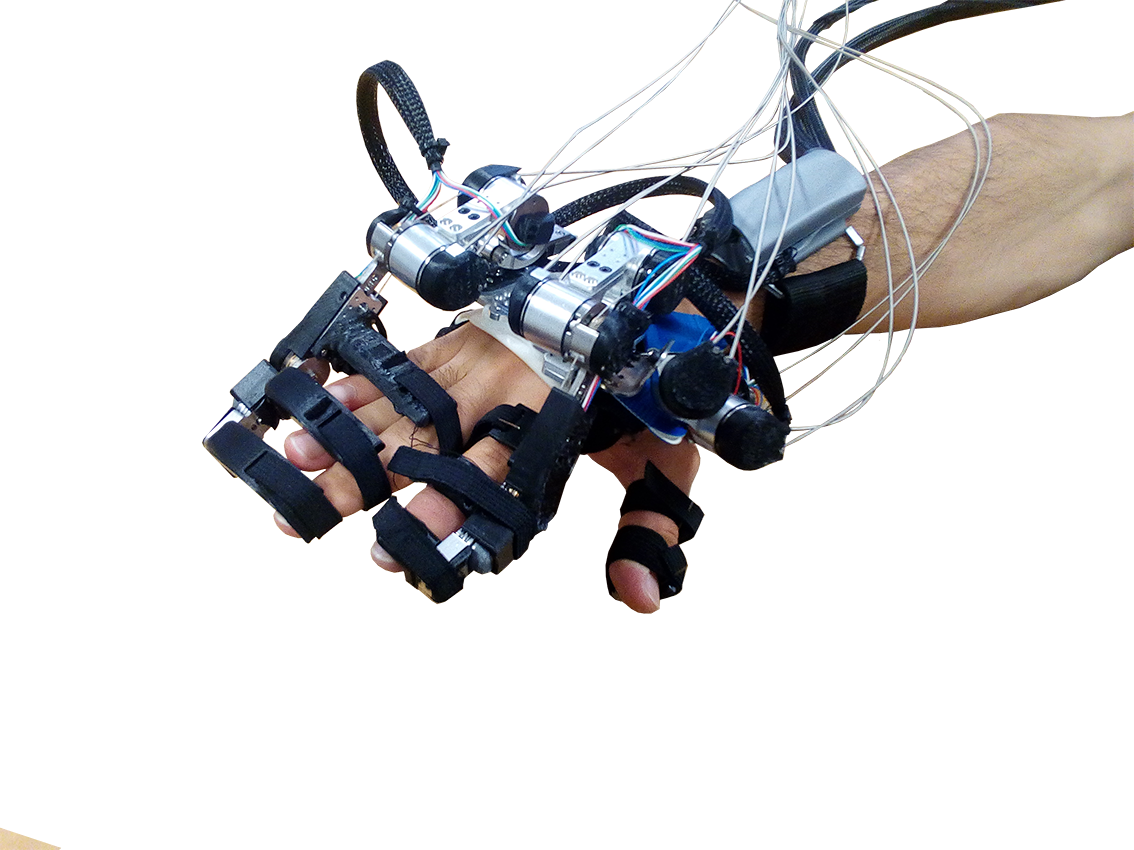
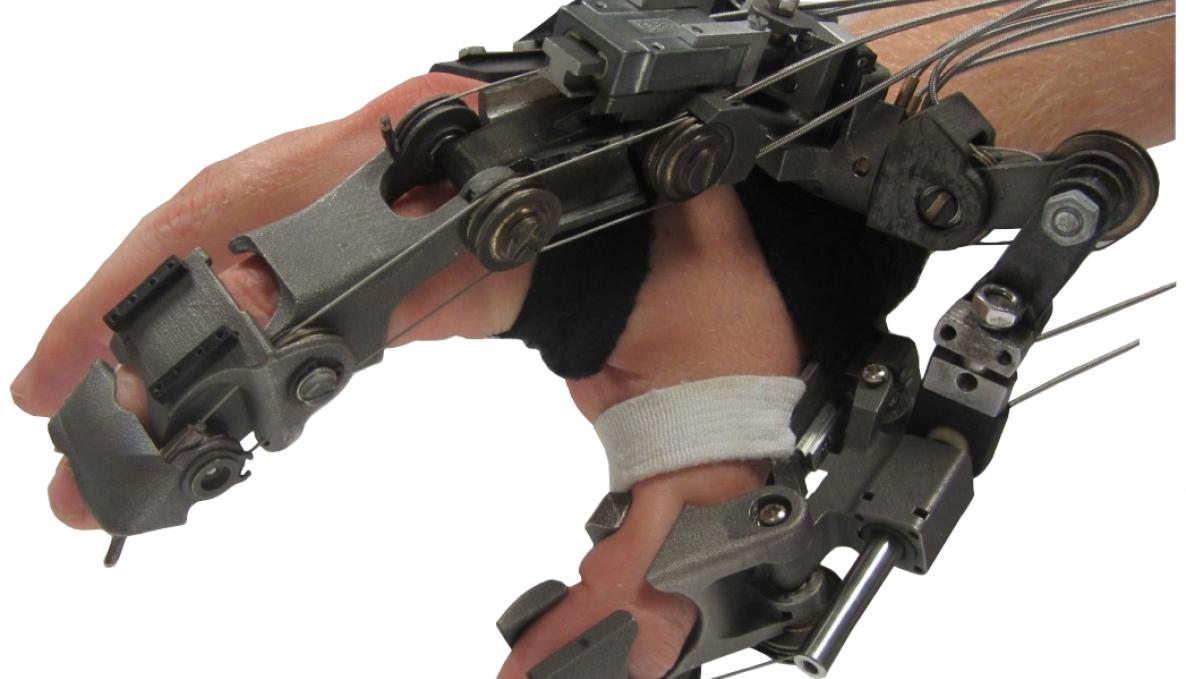
The project aims to develop novel wearable robotic devices for robot-assisted rehabilitation and functional hand recovery of workers affected by occupational diseases or following work-related injuries
The HABILIS++ project is a follow-up of the HABILIS project, promoted by the National Institute for Insurance against Accidents at Work (INAIL). The partners of the project are The BioRobotics Institute of Scuola Superiore Sant’Anna and the INAIL Motor Rehabilitation Center of Volterra. The HABILIS project aimed to develop novel wearable robotic devices for robot-assisted rehabilitation and functional hand recovery of workers affected by occupational diseases or following work-related injuries. Starting from the knowledge acquired from the previous project, the HABILIS++ project aims to overcome the limitations of current robotic solutions for hand mobilization. The state of the art of robotic hand devices does not take into account the inherent complexity of the human hand. Instead, robot-assisted rehabilitation of a post-traumatic hand must integrate actuation and sensing elements to allow an independent or synergistic joints mobilization based on the patient's needs, while ensuring the safety of the treated anatomical districts.
The HABILIS++ project aims to develop new mechatronic solutions to implement a hand exoskeleton able to perform a safe and accurate modular mobilization of fingers, and the validation of innovative robot-assisted therapeutic paths. The device will be equipped with human-robot interfaces adapting to the anatomy of the patient, and with sensors for the estimation of biomechanical parameters, useful for the clinical evaluation. The HABILIS++ project will produce new scientific knowledge about hand rehabilitation robotics.
PROMOTER: INAIL
GRANT NO.: PR19-RR-P4
PERIOD: 2021-2024 (36 months)
FUNDING: 750 k€
COORDINATORS: Prof. Nicola Vitiello, Dr. Simona Crea, Dr. Emilio Trigili, Dr. Andrea Baldoni, Dr. Elisa Taglione, Dr. Ilaria Creatini, Eng. Emanuele Gruppioni